ATMEGA8 là vi điều khiển AVR 28 chân. Mặc dù có nhiều bộ vi điều khiển tương tự, nhưng ATMEGA8 phổ biến vì nó là một trong những bộ vi điều khiển rẻ nhất và có nhiều tính năng với số chân ít hơn.
| Số chân | Tên chân | Mô tả | Chức năng |
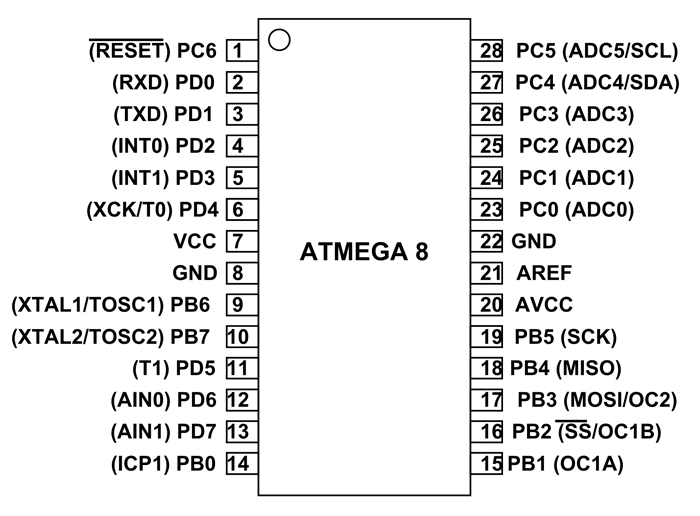
| 1 | PC6 (Reset) | Chân 6 của PORTC |
Theo mặc định, chân được sử dụng để reset. Nếu xung RSTDISBL được lập trình, PC6 có thể được sử dụng làm chân I / O. (Kéo lên mức logic cao để reset bộ điều khiển) |
| 2 | PD0 (RXD) | Chân 0 của PORTD |
RXD (chân đầu vào dữ liệu USART) Giao thức truyền dữ liệu nối tiếp USART [Có thể lập trình] |
| 3 | PD1 (TXD) | Chân 1 của PORTD |
TXD (Chân đầu ra USART) Giao thức truyền dữ liệu nối tiếp USART [Có thể được sử dụng để lập trình] INT2 (Đầu vào ngắt ngoài 2) |
| 4 | PD2 (INT0) | Chân 2 của PORTD |
Ngắt ngoài INT0
|
| 5 | PD3 (INT1) | Chân 3 của PORTD |
Ngắt ngoài INT1
|
| 6 | PD4 (XCK / T0) | Chân 4 của PORTD |
T0 (Đầu vào bộ đếm ngoài Timer0) XCK (Xung clock I / O bên ngoài USART) |
| 7 | VCC | Chân cấp nguồn dương | |
| 8 | GND | Chân nối đất | |
| 9 | PB6 (XTAL1 / TOSC1) | Chân 6 của PORTB |
XTAL1 (Chân bộ dao động xung clock 1 hoặc đầu vào xung nhịp bên ngoài) TOSC1 (Chân bộ dao động Timer 1) |
| 10 | PB7 (XTAL2 / TOSC2) | Chân 7 của PORTB |
XTAL2 (Chân dao động đồng hồ chip 2) TOSC2 (Chân bộ dao động Timer 2) |
| 11 | PD5 (T1) | Chân 5 của PORTD | T1 (Đầu bộ đếm bên ngoài Timer1) |
| 12 | PD6 (AIN0) | Chân 6 của PORTD |
AIN0 (Chân so sánh analog dương I / P)
|
| 13 | PD7 (AIN1) | Chân 7 của PORTD |
AIN1 (Chân so sánh analog âm I / P)
|
| 14 | PB0 (ICP1) | Chân 0 của PORTB | ICP1 (Chân capture đầu vào của Timer / Counter1) |
| 15 | PB1 (OC1A) | Chân 1 của PORTB | OC1A (Timer/Counter1 Output Compare Match A Output) |
| 16 | PB2 (SS/OC1B) | Chân 2 của PORTB |
SS (SPI Slave Select Input). Chân có mức logic thấp khi bộ điều khiển hoạt động ở chế độ Slave. [Giao thức ngoại vi dữ liệu nối tiếp (SPI)] OC1B (Timer/Counter1 Output Compare Match B Output) |
| 17 | PB3 (MOSI / OC2) | Chân 3 của PORTB |
MOSI (Master Output Slave Input). Khi bộ điều khiển hoạt động ở chế độ Slave, dữ liệu được nhận từ chân này. [Giao thức ngoại vi nối tiếp (SPI)] OC2 (Timer/Counter2 Output Compare Match Output) |
| 18 | PB4 (MISO) | Chân 4 của PORTB |
MISO (Master Input Slave Output). Khi bộ điều khiển hoạt động ở chế độ Slave, dữ liệu được bộ điều khiển này gửi thông qua chân này. [Giao thức ngoại vi nối tiếp (SPI)] |
| 19 | PB5 (SCK) | Chân 5 của PORTB |
SCK (SPI Bus Serial Clock). Đây là xung clock đồng bộ truyền dữ liệu giữa bộ điều khiển này với hệ thống khác. [Giao thức ngoại vi nối tiếp (SPI)] |
| 20 | AVCC | Cấp nguồn Vcc cho bộ chuyển đổi ADC bên trong | |
| 21 | AREF | Chân điện áp tham chiếu analog cho ADC | |
| 22 | GND | Chân nối đất | |
| 23 | PC0 (ADC0) | Chân 0 của PORTC | ADC0 (Kênh đầu vào ADC 0) |
| 24 | PC1 (ADC1) | Chân 1 của PORTC | ADC1 (Kênh đầu vào ADC 1) |
| 25 | PC2 (ADC2) | Chân 2 của PORTC | ADC2 (Kênh đầu vào ADC 2) |
| 26 | PC3 (ADC3) | Chân 3 của PORTC | ADC3 (Kênh đầu vào ADC 3) |
| 27 | PC4 (ADC4 / SDA) | Chân 4 của PORTC |
ADC4 (Kênh đầu vào ADC 4) SDA (Two-wire Serial Bus Data Input/Output Line) |
| 28 | PC5 (ADC5 / SCL) | Chân 5 của PORTC |
ADC5 (Kênh đầu vào ADC 5) SCL (Two-wire Serial Bus Clock Line) |
| CPU | AVR 8-bit |
| Số lượng chân | 28 |
| Điện áp hoạt động (V) |
Từ +2,7 V đến +5,5 V (ATmega8L) Từ +4,5 V TO +5,5 V (ATmega8) (+ 5,5V là điện áp tối đa tuyệt đối) |
| Số lượng chân I / O | 23 |
| Hỗ trợ giao thức giao tiếp |
Giao thức Master / Slave SPI (Chân 16,17,18,19) [Có thể lập trình bộ điều khiển này] Giao thức USART có thể lập trình (Chân 2,3) [Có thể lập trình bộ điều khiển này] Giao thức Two-wire (Chân 27,28) [kết nối với các thiết bị ngoại vi như cảm biến và màn hình LCD] |
| Giao thức JTAG | Không có |
| Module ADC | 6 kênh ADC độ phân giải 10-bit |
| Module timer | Hai bộ đếm 8 bit, Một bộ đếm 16 bit |
| Bộ so sánh analog | 1 |
| Module DAC | Không |
| Kênh PWM | 3 |
| Bộ tạo dao động bên ngoài |
0-8MHz ở ATMEGA8L 0-16MHz ở ATMEGA8 |
| Bộ dao động bên trong | Bộ dao động bên trong được hiệu chỉnh từ 0-8MHz |
| Loại bộ nhớ chương trình | Flash |
| Bộ nhớ chương trình hoặc bộ nhớ Flash | 8Kbyte [10000 chu kỳ ghi / xóa] |
| Tốc độ CPU (MIPS) | 16 MIPS |
| RAM | 1KBytes |
| EEPROM | 512Byte |
| Timer Watchdog | Có thể lập trình với bộ dao động trên chip riêng biệt |
| Khóa chương trình | Có |
| Chế độ tiết kiệm điện | Sáu chế độ [Chế độ chờ (Idle), giảm nhiễu tín hiệu ADC, tiết kiệm năng lượng (Power-save), tắt nguồn (Power-down), Chế độ ngủ (Standby) và Chế độ ngủ kéo dài (Extended Standby)] |
| Nhiệt độ hoạt động | Từ -55 ° C đến + 125 ° C (+125 là giá trị tối đa, -55 là giá trị nhỏ nhất) |
Lưu ý: Xem chi tiết thông tin kỹ thuật trong datasheet vi điều khiển ATMEGA8 ở cuối bài viết này.
ATMEGA328P, ATMEGA16, ATMEGA32, ATMEGA8535
ATMEGA8 là vi điều khiển AVR 28 chân. Mặc dù có nhiều bộ vi điều khiển tương tự, nhưng ATMEGA8 phổ biến vì nó là một trong những bộ vi điều khiển rẻ nhất và có nhiều tính năng với số chân ít hơn.
Với bộ nhớ chương trình 8Kbyte, nên có rất nhiều ứng dụng với ATMEGA8. Với các chế độ tiết kiệm điện khác nhau, nó có thể hoạt động trong các hệ thống di động. Với kích thước nhỏ gọn, nó có thể được đặt trong nhiều bảng mạch nhỏ.
Với bộ Timer Watchdog để reset khi có lỗi, nó được sử dụng trên các hệ thống ít có sự can thiệp của con người. Các tính năng này được bổ sung trong một bộ điều khiển làm cho ATMEGA8 trở nên phổ biến.
Sử dụng ATMega8 tương tự như các vi điều khiển ATMega khác, chẳng hạn như ATMega32. Tương tự, bộ điều khiển micro cần được lập trình và thêm các thiết bị ngoại vi thích hợp để lấy được đầu ra. Nếu không lập trình bộ điều khiển sẽ là một con chip trống rỗng.
Để sử dụng ATMEGA8, trước tiên cần ghi tệp chương trình thích hợp vào bộ nhớ FLASH ATMEGA8. Sau khi xuất code chương trình, bộ điều khiển thực thi code này và xuất tín hiệu phản hồi thích hợp.
(Thường dùng phần mềm Atmel Studio 6.0 dành cho Windows7 [ http://atmel-studio.software.informer.com/6.0/ ], Atmel Studio 7 dành cho Windows10 [ https://www.microchip.com/avr-support/atmel-studio-7 ])
(Hãy nhớ rằng đối với những IDE này, chương trình phải được viết bằng ngôn ngữ 'C')
Các ứng dụng
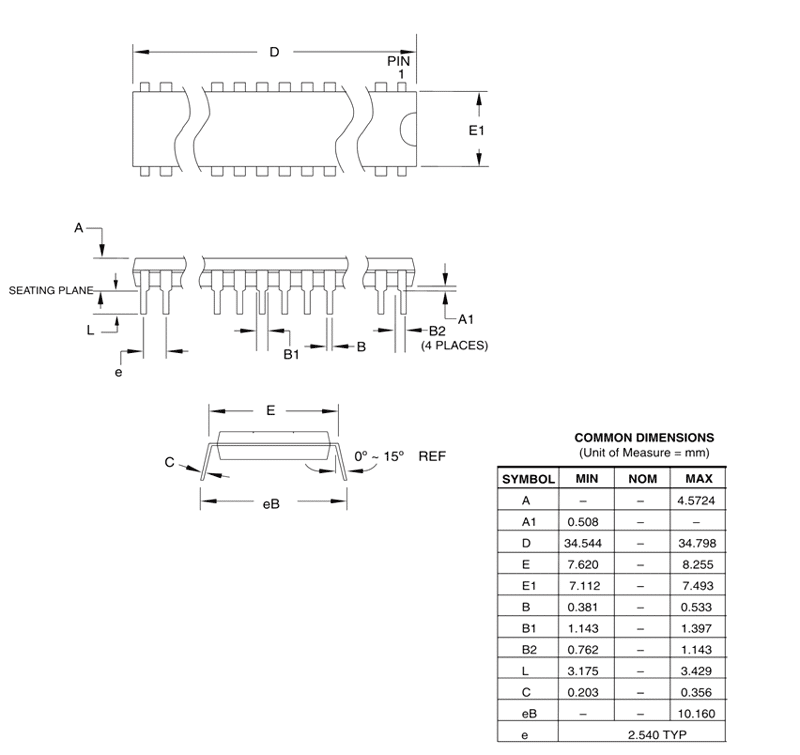
Tất cả các kích thước đo đều tính bằng milimét.
>>> 100+ Mã Sản Phẩm Dây Rút: https://mecsu.vn/san-pham/day-rut-nhua.5op
>>> 1000+ Mã Sản Phẩm Đầu Cosse: https://mecsu.vn/san-pham/dau-cosse.Q1j
>> Mời anh em xem thêm







![[Giới thiệu] Diode Schottky 1N5819](https://cms.mecsu.vn/uploads/media/2023/07/diode-schottky-1n5819-2.png)