Vi điều khiển PIC18F2550 là vi điều khiển 8 bit được thiết kế bởi MICROCHIP. Nó là một trong những bộ vi điều khiển rẻ nhất của dòng PIC18FXXXX.
Nó phổ biến do hiệu suất, giá rẻ và nhiều tính năng. Vi điều khiển PIC18F2250 có thể giao tiếp trực tiếp với PC khác.
Nó có nhiều tài liệu trợ giúp trên internet do tính phổ biến của nó và đó là một trong những lý do mà hầu hết các nhà phát triển và kỹ sư sử dụng nó. Bộ vi điều khiển có thể giữ cho thiết bị ngoại vi vẫn hoạt động khi lõi CPU ở chế độ chờ và việc sử dụng bộ dao động bên trong cũng giúp bộ điều khiển tiết kiệm điện năng lên đến 90%.
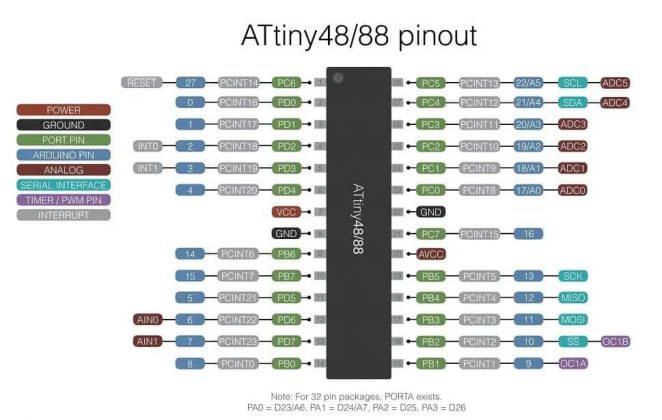
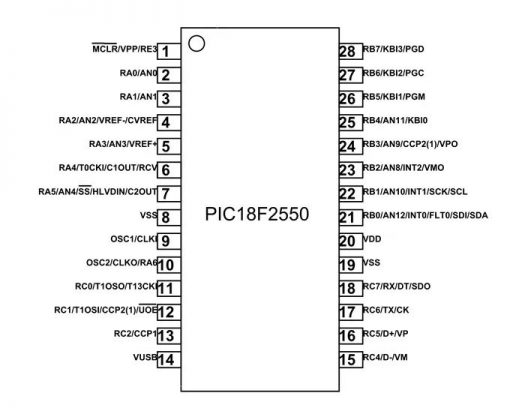
Sơ đồ sơ đồ chân bao gồm chi tiết của tất cả các chân và thiết bị ngoại vi được liệt kê dưới đây:
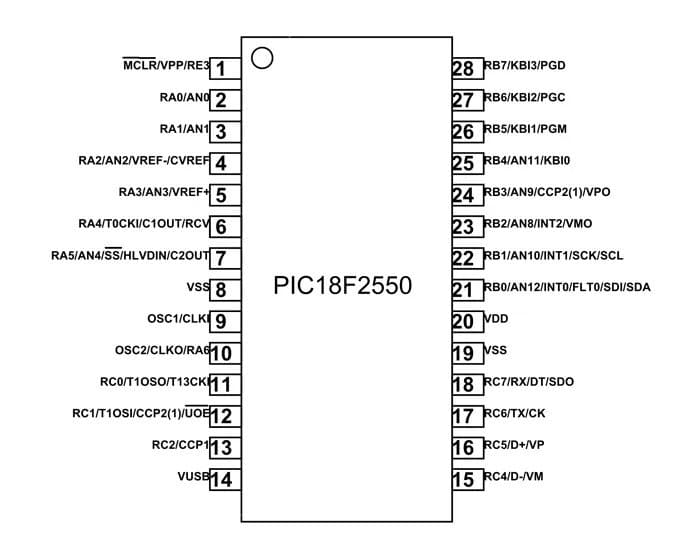
Trong phần này, chúng ta sẽ thấy tất cả các tính năng và chi tiết của các tính năng được tích hợp sẵn có sẵn.
Bộ vi điều khiển có bốn cổng GPIO (A, B, C và E). Thay vì E, tất cả các cổng đều cung cấp chức năng đầu ra. Chân đầu ra gắn vào cổng A và B đưa ra logic TTL nhưng đầu ra cổng C lại ở logic ST. Các chân đầu ra trên PIC18F2250 là:
Trong PIC18F2550 số lượng chân đầu vào nhiều hơn bất kỳ chân nào khác. Mỗi cổng đi kèm với khả năng đầu vào. Các chân đầu vào trên cổng A & B tất cả các chân đầu vào có thể hoạt động với đầu vào TTL nhưng ở cổng C (RC4 và RC5) chỉ có thể hoạt động với đầu vào TTL các chân khác trên cổng C và E yêu cầu logic ST để hoạt động nếu không có thể gây ra sự cố cho chương trình vi điều khiển để hiểu và vận hành đúng cách. Danh sách tất cả các chân đầu vào là:
Mọi thiết bị bên ngoài đều yêu cầu chức năng ngắt trong trường hợp nhận được sự chú ý của CPU và PIC18F2550 có ba chân ngắt có thể được sử dụng để nhận tín hiệu đầu vào để tạo ra ngắt trong bộ vi điều khiển. Các chân ngắt là:
Ngày nay hầu hết các hệ thống đều yêu cầu hệ thống truyền thông nối tiếp và Hệ thống truyền thông nối tiếp không đồng bộ Eusart là một trong những hệ thống phổ biến nhất cho truyền thông nối tiếp. Nó có các chân truyền và nhận dữ liệu riêng biệt và cả hai đều có thể được sử dụng cùng một lúc.
Bộ điều khiển đôi khi yêu cầu các mô-đun bên ngoài để thực hiện giao tiếp và một số trong số chúng sử dụng phương thức giao tiếp SPI. Nó được biết đến như một hệ thống giao tiếp ba dây sử dụng hai dây dữ liệu, một dây xung đồng hồ và dây thứ ba được gọi là lựa chọn phụ, được sử dụng trong trường hợp có nhiều thiết bị ngoại vi. Chân SPI trên PIC18F2550 là:
Nó là một giao tiếp nối tiếp hai dây nhưng nó là một chiều. Nó sử dụng hai dây một được sử dụng cho xung đồng hồ và dây khác sẽ được sử dụng để truyền và nhận dữ liệu. Xung nhịp giúp bộ điều khiển có thể sử dụng nhiều thiết bị ngoại vi cùng một lúc. Các chân I2C trong PIC18F2550 được đưa ra dưới đây:
IC có nhiều cách để lập trình nhưng nó có thể được lập trình thông qua lập trình nối tiếp đồng bộ. Để lập trình bộ điều khiển nối tiếp ba chân sẽ được sử dụng, chân đầu tiên cho đồng hồ, chân thứ hai để truyền / nhận dữ liệu và chân thứ ba để lập trình đầu vào nguồn.
Nó được gọi là lập trình nối tiếp trong mạch, sử dụng một mạch lập trình đặc biệt do công ty MICROCHIP thiết kế để lập trình vi điều khiển bằng cách sử dụng tệp HEX của chương trình. Trong quá trình này, 6 chân sẽ được sử dụng. Tất cả các chân này được liệt kê bên dưới:
Trong PIC18F2550 USB có thể được kết nối trực tiếp với vi điều khiển. Pic chứa giao diện USB tốc độ đầy đủ và một nửa tốc độ. Có thể kết nối USB thông qua bộ thu phát bên trong hoặc bộ thu phát bên ngoài. Bộ thu phát bên trong có thể được kết nối với giao diện USB bên ngoài nhưng nó cũng có khả năng sử dụng bộ thu phát bên ngoài trong trường hợp cần thiết. Các chân cho cả hai bộ thu phát được đưa ra dưới đây:
Có tổng cộng bốn bộ đếm thời gian trong PIC18F2550. Một bộ định thời (Timer0) có 8 bit và ba bộ định thời khác (Timer1, Timer2, Timer3) có 16 bit. Trong PIC18F2550 Timer1 có thể sử dụng bộ dao động bên ngoài, tách biệt với bộ dao động của vi điều khiển. Bộ định thời 1 và bộ định thời 3 là bộ hẹn giờ duy nhất có thể hoạt động với tín hiệu đầu vào bên ngoài, bộ hẹn giờ 0 và bộ định thời 2 chỉ hoạt động bên trong:
-T0CKI (Ngõ vào đồng hồ ngoài Timer0) - GPIO6
-T1OSO (Ngõ ra bộ tạo dao động Timer1) - GPIO11
-T13CKI (Ngõ vào đồng hồ ngoài Timer3) - GPIO11
-T1OSI (Ngõ vào bộ tạo dao động Timer1) - GPIO12
Nó là một chốt cung cấp an toàn cho bộ điều khiển. Bằng cách này, người dùng sẽ có thể khởi tạo dải điện áp trong bộ vi điều khiển từ nơi thiết bị sẽ ngắt. Đầu vào trên chân này sẽ là tín hiệu đầu vào tương tự có thể tạo ra ngắt.
Bộ chuyển đổi tương tự sang kỹ thuật số trở thành nhu cầu của mọi mạch kỹ thuật số vì nhiều cảm biến và thiết bị ngoại vi cung cấp đầu ra ở dạng tương tự và bộ vi điều khiển yêu cầu kênh chuyển đổi tương tự để hoạt động trên dữ liệu đó.
Trong PIC18F2550 có tổng cộng 10 kênh chuyển đổi A / D 10-bit. Tất cả các kênh này có thể chuyển đổi 10 tín hiệu đầu vào tương tự thành tín hiệu kỹ thuật số và sau đó nó lưu trữ / sử dụng theo hướng dẫn được đưa ra trong chương trình. Các chân ADC trong PIC18F2550 được liệt kê bên dưới:
Trong PIC18F2550 ADC thông minh vì có các chân VREF. Có hai chân pin Vref, một trong số chúng được sử dụng để mô tả điện áp tối đa của tín hiệu tương tự đầu vào và chân thứ hai sẽ được sử dụng cho đầu vào của điện áp tối thiểu của tín hiệu đầu vào tương tự. Bằng cách này, ADC chỉ cung cấp đầu ra của các giá trị trong phạm vi do VREF đưa ra. Các chân tham chiếu điện áp là:
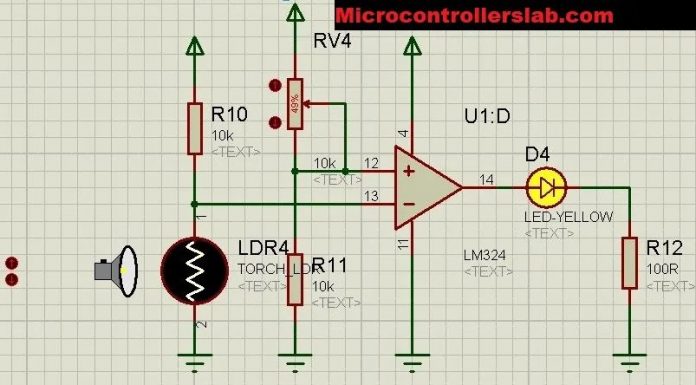
Có hai bộ so sánh trong bộ vi điều khiển. Hai bộ so sánh này có thể so sánh nhiều đầu vào. Đầu vào của chúng có thể được sử dụng bằng cách sử dụng bất kỳ tín hiệu đầu vào tương tự nào từ AN0-AN4. Điện áp đầu ra có thể được so sánh trên VDD hoặc tham chiếu điện áp bộ so sánh riêng biệt có thể được cung cấp trên chân tham chiếu bộ so sánh.
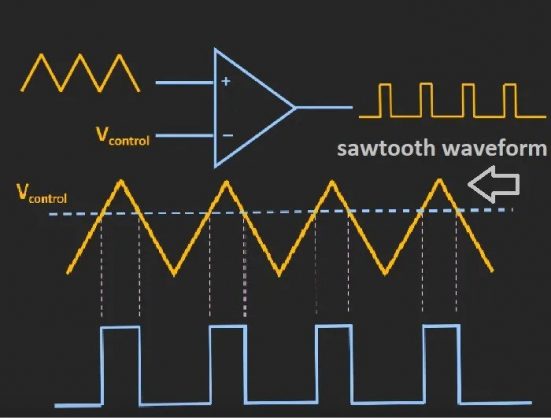
Trong vi điều khiển này, có hai chân chụp / so sánh / PWM. Mô-đun bên trong này sử dụng Timer1 và Timer3 và cho phép thiết bị tạo ra đầu ra tại một thời điểm cụ thể. Mô-đun này cho phép bộ điều khiển tạo PWM của chu kỳ nhiệm vụ mong muốn bằng cách sử dụng bộ định thời và Bộ định vị. Các chân đầu ra của mô-đun này trong PIC182550 là:
Theo mặc định, RB3 sẽ cung cấp đầu ra nhưng RC1 và RB3 có thể được phân biệt với chương trình bên trong. Chân phát hiện lỗi được sử dụng để khởi tạo khoảng thời gian hoạt động lỗi tối thiểu trong CCP1 (đầu ra bộ so sánh 1). Đọc các hướng dẫn liên quan đến PWM này:
-PWM SỬ DỤNG MICROCONTROLLER PIC16F877A
-Mô-đun CCP Capture So sánh Điều chế độ rộng xung
ĐẶT LẠI PIN
PIC18F2550 có chân đặt lại bên ngoài có thể được sử dụng để đặt lại hoàn toàn bộ vi điều khiển. Chân là một chân thấp hoạt động và có thể được vận hành bằng một nút hoặc bất kỳ thiết bị trạng thái logic ST nào.
-MCLR ’- GPIO1
POWER INPUT PINS
PIC có ba chân nguồn; một được sử dụng cho đầu vào nguồn và hai chân còn lại là chân nối đất được sử dụng để tạo điểm nối đất chung và chúng cũng là chân chung trong bộ điều khiển. Chân nguồn và chân nối đất của PIC18F2550 là:
-VSS - GPIO19, GPIO8
-VDD - GPIO20
OSCILLATOR / PIN ĐỒNG HỒ
Mọi vi điều khiển đều yêu cầu một xung đồng hồ để hoạt động. PIC18F2550 đi kèm với xung nhịp bên trong từ 32KHz đến 8MHz và nó có thể được hiệu chỉnh ở một cấp độ khác thông qua hướng dẫn. Để sử dụng xung nhịp lên đến 48MHz, bộ điều khiển cung cấp hai chân đầu vào xung nhịp, một chân cho đầu vào và chân thứ hai cho đầu ra. Cả hai chân là:
-OSC1 / CLKI - GPIO9
-OSC2 / CLKO - GPIO10
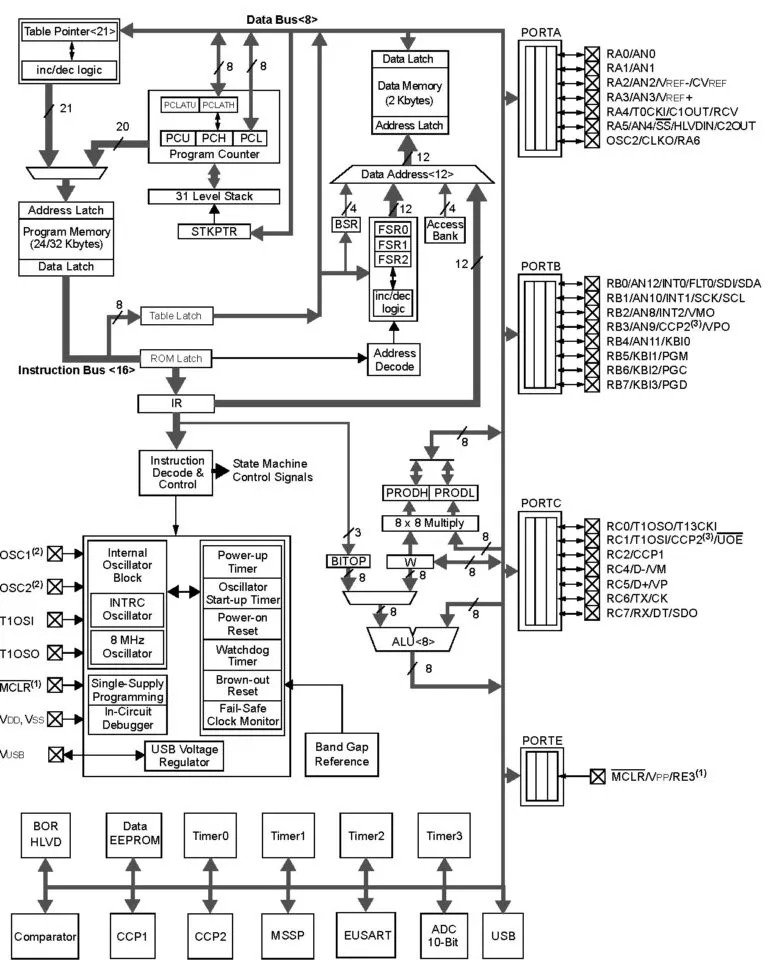
BLOCK DIAGRAM Vi điều khiển PIC18F2550
Đây là sơ đồ khối của PIC18F2550:
Lập trình vi điều khiển PIC18F2550
Để bắt đầu học lập trình vi điều khiển pic, bạn nên nắm rõ về các chân GPIO. Do đó, chúng tôi đã trình bày chi tiết về tất cả các chân và chức năng của chúng trong các phần trước. Chúng ta có thể sử dụng hợp ngữ hoặc lập trình c để lập trình vi điều khiển. Chúng tôi khuyên bạn nên xem các hướng dẫn bắt đầu này:
Để bắt đầu lập trình, bạn cần có các thành phần phần mềm và phần cứng sau:
Chúng tôi sẽ cập nhật phần này với các ví dụ lập trình bằng ngôn ngữ C nhúng trong phần này.
Nó được sử dụng với những thiết bị yêu cầu giao diện với PC.
Hầu hết các ứng dụng thông minh sử dụng PIC18F2550 vì nó lấp đầy gần như tất cả các giao thức truyền thông của hầu hết các ứng dụng.
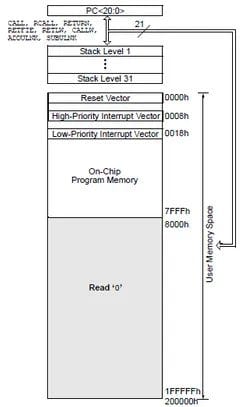
PIC18F2550 có bộ nhớ 32KB được đưa ra dưới đây:
>> Mời anh em xem thêm