![[Kiến thức] Động cơ Servo MG996R](https://cms.mecsu.vn/uploads/media/2023/07/dong-co-servo-mg996r-2.png)
MG996R là động cơ servo bánh răng kim loại với mô-men xoắn cực đại 11 kg / cm. Giống như các RC servo khác, động cơ quay từ 0 đến 180 độ dựa trên chu kỳ hoạt động của sóng PWM được cung cấp cho chân tín hiệu của nó.


| Số dây | Màu dây | Sự miêu tả |
| 1 | Màu nâu | Dây nối đất nối với đất của hệ thống |
| 2 | Màu đỏ | Nguồn điện động cơ thường + 5V được sử dụng |
| 3 | Trái cam | Tín hiệu PWM được đưa vào qua dây này để điều khiển động cơ |
Bánh răng kim loại MG90S, Bánh răng kim loại mô-men xoắn cao MG995, Servo tương tự VTS-08A
Có rất nhiều động cơ servo có sẵn trên thị trường và mỗi loại có đặc điểm và ứng dụng riêng. Hai đoạn sau sẽ giúp bạn xác định đúng loại động cơ servo cho dự án / hệ thống của bạn.
Hầu hết các động cơ Servo sở thích hoạt động từ 4,8V đến 6,5V, điện áp càng cao thì mô-men xoắn chúng ta có thể đạt được, nhưng phổ biến nhất là chúng được hoạt động ở + 5V. Hầu như tất cả các động cơ servo sở thích chỉ có thể quay từ 0 ° đến 180 ° do cách bố trí bánh răng của chúng, vì vậy hãy đảm bảo rằng dự án của bạn có thể sống với nửa vòng tròn nếu không, bạn có thể thích động cơ 0 ° đến 360 ° hoặc sửa đổi động cơ để thực hiện một vòng tròn đầy đủ.
Các bánh răng trong động cơ dễ bị mài mòn, vì vậy nếu ứng dụng của bạn yêu cầu động cơ chạy lâu và mạnh hơn, bạn có thể đi với bánh răng kim loại hoặc chỉ gắn với bánh răng nhựa thông thường.
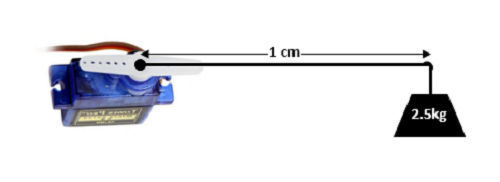
Tiếp theo phải kể đến thông số quan trọng nhất, đó là mô-men xoắn mà động cơ hoạt động. Một lần nữa có nhiều sự lựa chọn ở đây nhưng chúng ta hãy giả sử một trong những lựa chọn có mô-men xoắn 2,5kg / cm đi kèm với Động cơ MG996R.
Mômen xoắn 2,5kg / cm này có nghĩa là động cơ có thể kéo một vật nặng 2,5kg khi nó được treo ở khoảng cách 1cm. Vì vậy nếu treo tải 0,5cm thì động cơ kéo được tải trọng 5kg, tương tự nếu treo tải là 2cm thì động cơ chỉ kéo được 1,25.
Dựa trên tải trọng mà bạn sử dụng trong dự án, bạn có thể chọn động cơ có mô-men xoắn phù hợp. Hình ảnh dưới đây sẽ minh họa tương tự.
Sau khi chọn động cơ Servo phù hợp cho dự án, hãy đặt câu hỏi làm thế nào để sử dụng nó. Như chúng ta biết có ba dây dẫn ra khỏi động cơ này. Mô tả của cùng một được đưa ra trên đầu trang này.
Để làm cho động cơ này quay, chúng ta phải cấp nguồn cho động cơ với + 5V sử dụng dây Đỏ và Nâu và gửi tín hiệu PWM đến dây màu Cam.
Do đó, chúng ta cần thứ gì đó có thể tạo ra tín hiệu PWM để làm cho động cơ này hoạt động, thứ này có thể là bất cứ thứ gì giống như Bộ hẹn giờ 555 hoặc các nền tảng Vi điều khiển khác như Arduino, PIC, ARM hoặc thậm chí là một bộ vi xử lý như Raspberry Pi.
Bây giờ, làm thế nào để điều khiển hướng của động cơ? Để hiểu điều đó, chúng ta hãy xem hình ảnh được đưa ra trong biểu dữ liệu.
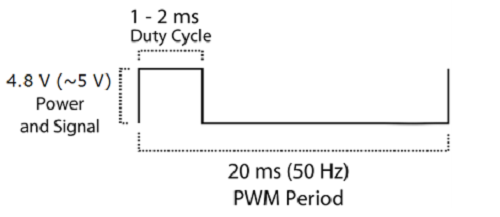
Từ hình ảnh, chúng ta có thể hiểu rằng tín hiệu PWM tạo ra nên có tần số 50Hz và chu kỳ PWM phải là 20ms. Trong đó Thời gian đúng giờ có thể thay đổi từ 1ms đến 2ms. Vì vậy, khi on-time là 1ms, động cơ sẽ ở 0 ° và khi 1.5ms, động cơ sẽ ở 90 °, tương tự khi nó là 2ms, nó sẽ là 180 °. Vì vậy, bằng cách thay đổi thời gian đúng giờ từ 1ms đến 2ms, động cơ có thể được điều khiển từ 0 ° đến 180 °
>>> 100+ Mã Sản Phẩm Dây Rút: https://mecsu.vn/san-pham/day-rut-nhua.5op
>>> 1000+ Mã Sản Phẩm Đầu Cosse: https://mecsu.vn/san-pham/dau-cosse.Q1j
>> Mời anh em xem thêm








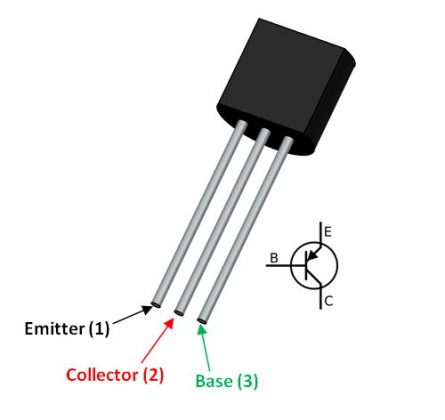
![[Kiến thức] Transistor công suất NPN 2SC5200](https://cms.mecsu.vn/uploads/media/2023/07/transistor-cong-suat-npn-2sc5200-2.png)