
![[Tìm hiểu] Vi điều khiển PIC16F676](https://cms.mecsu.vn/uploads/media/2023/08/vi-dieu-khien-pic16f676-356x220.jpg)
PIC16F676 là vi điều khiển pic có kích thước nhỏ, là một trong những lựa chọn tốt nhất cho các ứng dụng nhúng. Hầu hết các thiết bị gia dụng và công nghiệp đều yêu cầu số lượng chân cắm nhỏ và không gian bộ nhớ nhỏ, điều này có thể được đáp ứng bởi PIC16F676.
Nó đáng tin cậy cho các dự án của sinh viên do hiệu suất cao được nâng cao nhờ công nghệ dựa trên flash. PIC16F676 có thể có kích thước nhỏ hơn nhưng nó có bộ chuyển đổi Analog sang kỹ thuật số 10 bit bên trong trong một gói 14 chân.
Vi điều khiển PIC cũng có nhiều gói và mỗi gói bao gồm 14 chân. Bộ nhớ flash bên trong của vi điều khiển là 2kb, rất lý tưởng cho các dự án nhỏ và đặc biệt là để phát triển một chương trình nhỏ.
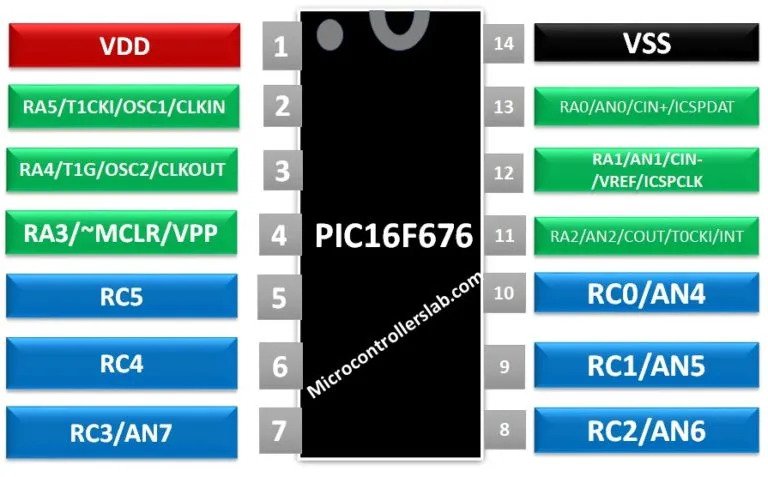
Sơ đồ sơ đồ chân được đưa ra ở đây. Bộ vi điều khiển này có hai cổng GPIO PORTA và PORTC. Cả hai chân GPIO này đều có nhiều chức năng. Chúng ta sẽ xem xét chi tiết từng chân GPIO sau trong phần này.
Chức năng và chi tiết của tất cả các chân GPIO được liệt kê ở đây.
POWER Pins
PIC16F676 chỉ có hai chân nguồn đầu vào. Một được sử dụng để cung cấp điện và thứ hai được sử dụng để làm mặt bằng chung.
Để sử dụng đồng hồ hoặc bộ dao động bên ngoài với PIC16F676, có hai chân, một chân cho đầu vào và chân thứ hai cho đầu ra.
Trong PIC này có hai cổng I / O mục đích chung A & C, hoạt động như đầu ra. Cả hai cổng đều cho kết quả đầu ra ở dạng TTL. Đầu ra trên các chân này sẽ không nhiều hơn VDD. Các đầu ra kỹ thuật số đơn giản này chỉ có thể được sử dụng thông qua chương trình nhưng chúng ta sẽ cần chỉ định cổng để truy cập vào chân của cổng đó. Các chân đầu ra kỹ thuật số trong PIC16F676 là:
Trong PIC16F676, mọi chân của cả hai cổng A & C đều có thể được sử dụng làm chân đầu vào. Các chân này dựa trên TTL và cần phải lập trình. Các chân này có các điện trở kéo lên đầu vào có thể lập trình được. Điện áp trên các chân này không được tăng hơn VDD. Tất cả các chân đầu vào là:
Các chân ngắt hoạt động giống như các chân đầu vào, mục đích cơ bản của chúng là thu hút sự chú ý của bộ điều khiển bằng cách bỏ qua tất cả các chức năng khác. Nó phải được mô tả trong chương trình những gì bộ điều khiển phải làm trong trường hợp ngắt. Trong PIC16F676 chỉ có một chân ngắt kết nối với bộ đếm chương trình và yêu cầu kích hoạt Schematic Trigger (ST).
Mã PIN SO SÁNH
PIC16F676 cũng có một bộ so sánh được sử dụng để so sánh các đầu vào tương tự. Bộ so sánh đơn sử dụng ba chân, hai chân cho đầu vào và một chân cho đầu ra. TTL và ST, cả hai đầu vào đều có thể được sử dụng trên các chân này, nhưng đầu ra sẽ luôn phụ thuộc vào đầu vào. Các chân so sánh trong PIC16F676 là:
PIN HẸN GIỜ
Trong PIC16F676 có hai bộ định thời bên trong và một trong những bộ định thời có cổng hẹn giờ về cơ bản được sử dụng để điều khiển trạng thái nguồn của bộ định thời 1. Các chân hẹn giờ của PIC16F676 là:
PIN GIAO DIỆN SERIAL
Trong vi điều khiển này, cũng có một chân giao tiếp nối tiếp, nhưng giao tiếp nối tiếp của các chân này sẽ đồng bộ và chủ yếu sẽ được sử dụng để lập trình. Ba chân sẽ được sử dụng, một chân để di chuyển dữ liệu, chân thứ hai cho xung đồng hồ và thứ ba cho điện áp. Các Ghim là:
ANALOG ĐẦU VÀO PIN
PIC16F676 cho phép các kênh ADC bên trong chuyển đổi tín hiệu tương tự sang kỹ thuật số. Để chuyển đổi tín hiệu tương tự trong PIC16F676 có tổng cộng 8 kênh có thể được sử dụng để chuyển đổi sang các giá trị kỹ thuật số, thanh ghi 10-bit được sử dụng để lưu trữ giá trị được chuyển đổi. Chân tham chiếu điện áp được sử dụng để chọn điện áp tối đa giữa VDD và Vref. Đây là tất cả các chân tương tự và chân tham chiếu:
ĐẶT LẠI PIN
PIC chỉ đi kèm với một chốt đặt lại bên ngoài có thể được điều khiển bằng kỹ thuật số hoặc bằng nút bên ngoài. Chân đặt lại là chân thấp hoạt động và hoạt động trên logic cơ sở ST.
MCLR ’- Pin4
Nếu bạn muốn bắt đầu với lập trình vi điều khiển pic bằng ngôn ngữ c hoặc hợp ngữ, bạn có thể xem hướng dẫn đầy đủ này:
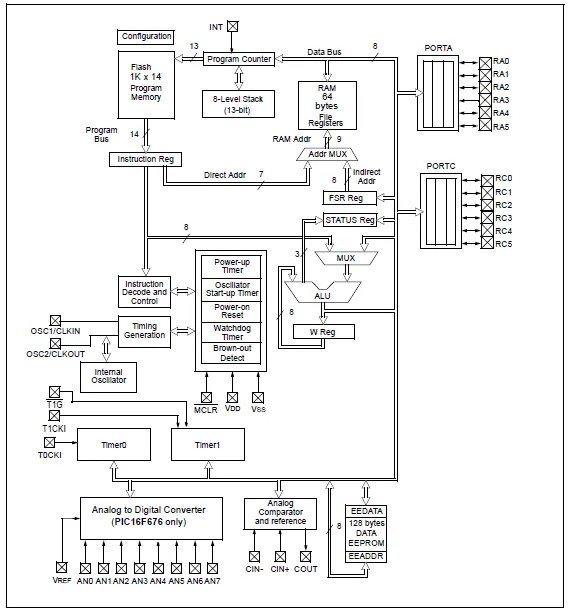
SƠ ĐỒ KHỐI PIC16F676
Nó có dòng điện dự phòng là 1nA ở 2V và dòng hoạt động là 100uA ở 2V nhưng điện áp hoạt động thay đổi theo bộ dao động.
Các tùy chọn thay thế của vi điều khiển pic là PIC16F877A, PIC16F84A, PIC18F46K22
Như đã đề cập trước đó, giống như các bộ vi điều khiển pic khác, nó cung cấp ADC tích hợp sẵn, bộ định thời và các tính năng lập trình nối tiếp. Chúng tôi giải thích các thanh ghi của các thiết bị ngoại vi này trong phần này.
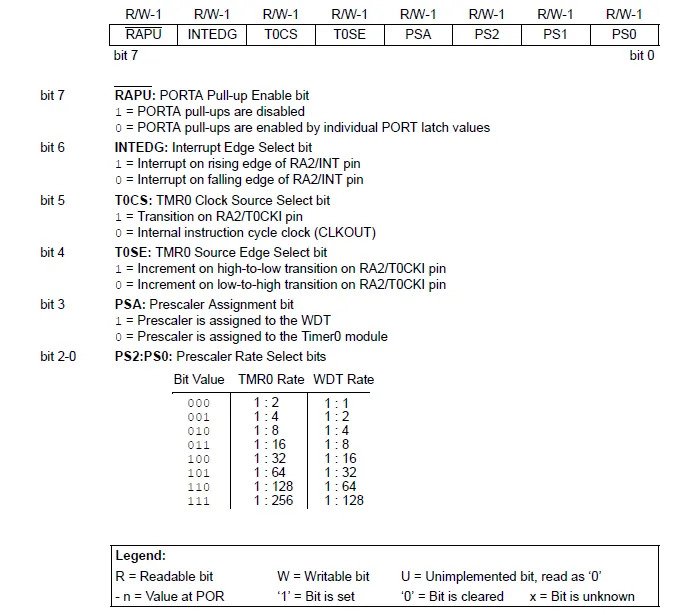
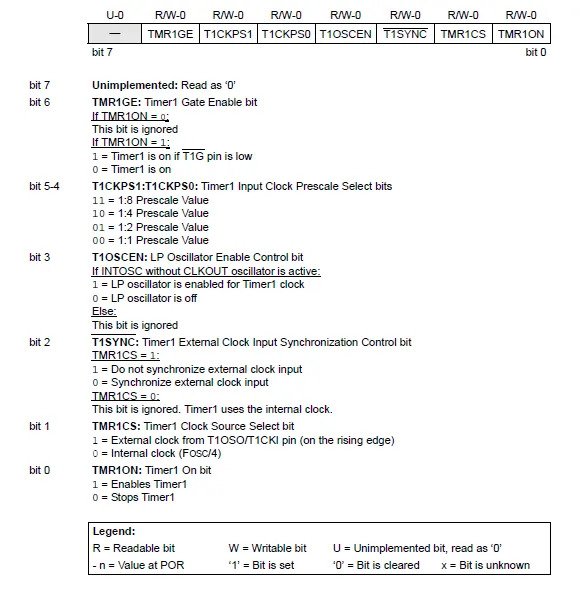
PIC16F676 có hai thanh ghi bộ định thời bên trong mà các giá trị có thể được thao tác hoặc kiểm tra theo yêu cầu. Trong bộ điều khiển này, timer0 là 8 bit và có thanh ghi khác so với timer1:
Time1 là bộ đếm thời gian 16 bit và có các tính năng khác nhau và nó cũng có chân điều khiển được gọi là cổng:
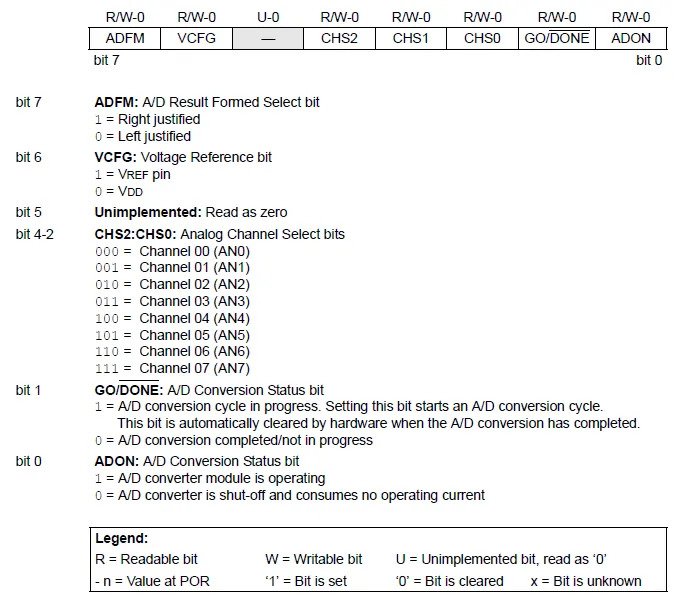
Trong chuyển đổi Analog sang Digital, dữ liệu và chuyển đổi sẽ được điều khiển bởi ba thanh ghi.
Ba thanh ghi này sẽ chuyển đổi dữ liệu Analog sang Digital với các trạng thái khác nhau.
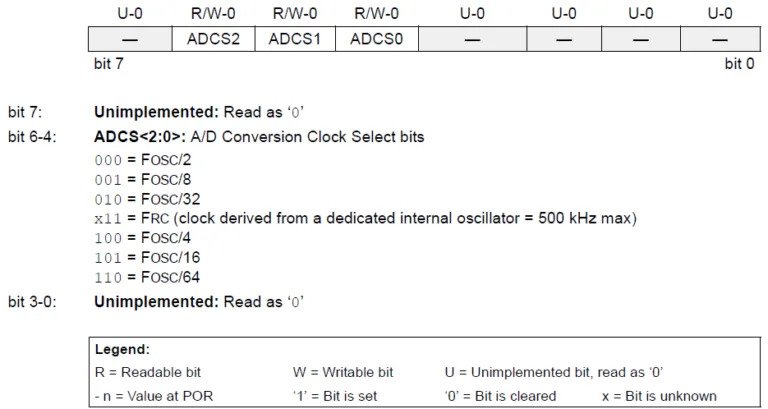
ANCON1 sẽ được sử dụng để chọn bit đồng hồ chuyển đổi từ tương tự sang kỹ thuật số. Bit thứ ba là bit chọn được sử dụng vì các chân tương tự không chỉ là chân tương tự mà chúng còn có thể được sử dụng cho các chức năng khác. Thanh ghi này sẽ có thể giúp bộ điều khiển sử dụng các chân đó làm chân analog hoặc chân kỹ thuật số.
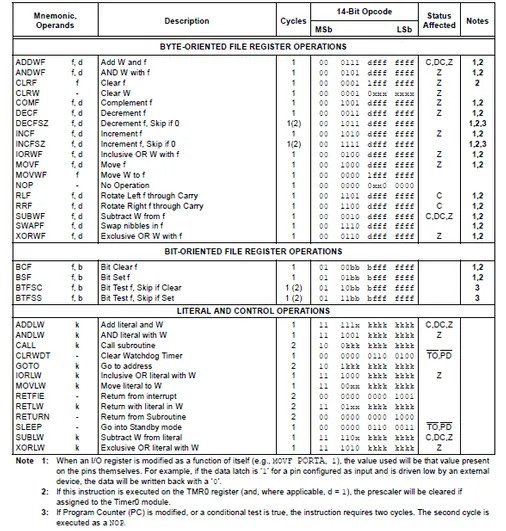
Tập lệnh 14 bit được sử dụng trong PIC16F676. Tập lệnh được phân loại thành ba phần.
Trong Byte-Oriented, tập lệnh 14 bit được chia thành ba phần.
Hoạt động định hướng bit
Trong Bit-Oriented, tập lệnh cũng sẽ được chia thành ba phần nhưng nó có số lượng bit khác nhau cho các hoạt động khác nhau:
Hoạt động theo nghĩa đen và điều khiển
Trong hoạt động Literal và Control, dữ liệu sẽ được chia thành hai phần.
Để được hướng dẫn Gọi và GOTO
Đối với các hướng dẫn khác
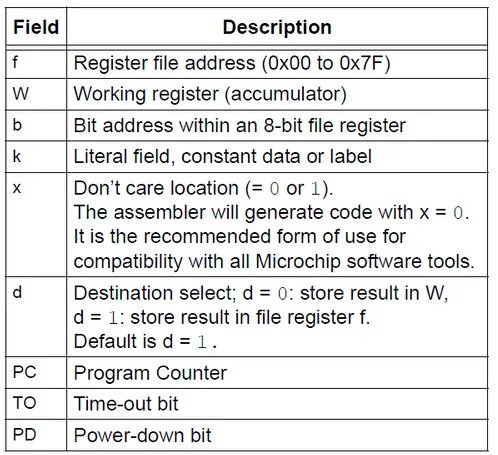
Có một số đại diện cho bit đích, chữ và tệp. Dưới đây là bảng đại diện cho từng và mọi giá trị có sẵn:
PIC có thể được lập trình dễ dàng bằng cách sử dụng hướng dẫn đã cho và hơn thế nữa từ biểu dữ liệu. Phiên bản PIC này cũng có thể được lập trình từ các phương pháp khác nhau. PIC16F676 chỉ đáng tin cậy khi nó phải thực hiện một số chức năng điều khiển. Nó sẽ không thể thực hiện các hoạt động thông minh do thiết kế hạn chế nhưng nó là lựa chọn tốt nhất để sử dụng làm vi điều khiển.
>> Mời anh em xem thêm





![[Tìm hiểu] Cách sử dụng MOSFET / IGBT DRIVER IR2110](https://cms.mecsu.vn/uploads/media/2023/08/igbt-driver-ir2110-597x420.jpg)
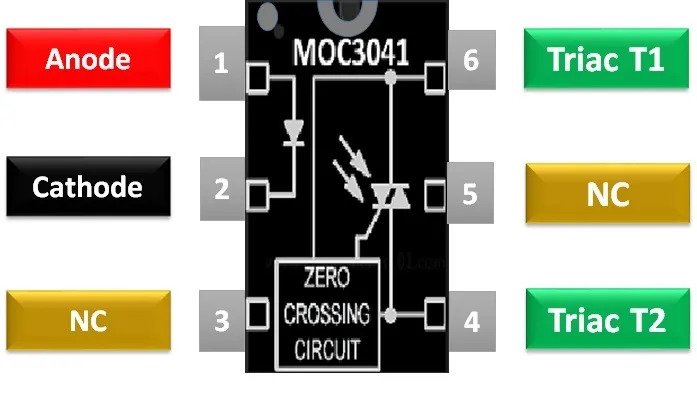
![[Tìm hiểu] Vi điều khiển PIC12C508](https://cms.mecsu.vn/uploads/media/2023/08/moc3041-so-do-bo-noi-optocoupler-khong-cat-ngang-2-1.jpg)
![[Tìm hiểu] Bộ khuếch đại công suất âm thanh LM4871](https://cms.mecsu.vn/uploads/media/2023/08/bo-khuech-dai-cong-suat-am-thanh-lm4871.jpg)

.jpg)
