
![[Tìm hiểu] Kit vi điều khiển MSP432](https://cms.mecsu.vn/uploads/media/2023/07/tim-hieu-kit-vi-dieu-khien-msp432-625x420.jpg)
Launchpad MSP432 là một trong những bảng mạch vi điều khiển nhỏ nhất và rẻ nhất. Các nhà phát triển và kỹ sư có thể sử dụng để thiết kế ứng dụng giao tiếp với các module bên ngoài.
MSP432 được thiết kế với bộ vi điều khiển ARM 32-bit Cortex-M4F cho hiệu suất cao ở mức công suất thấp. Thích hợp để vận hành và điều khiển các thiết bị công suất thấp yêu cầu hiệu suất cao với 32-bit.
Bảng mạch có nhiều loại chân gỡ lỗi (debugger) và lập trình. Các ứng dụng điều khiển hiện đại như IoT và robot có thể được thiết kế với MSP432. Kích thước bảng mạch có thể được giảm thiểu nếu được yêu cầu.
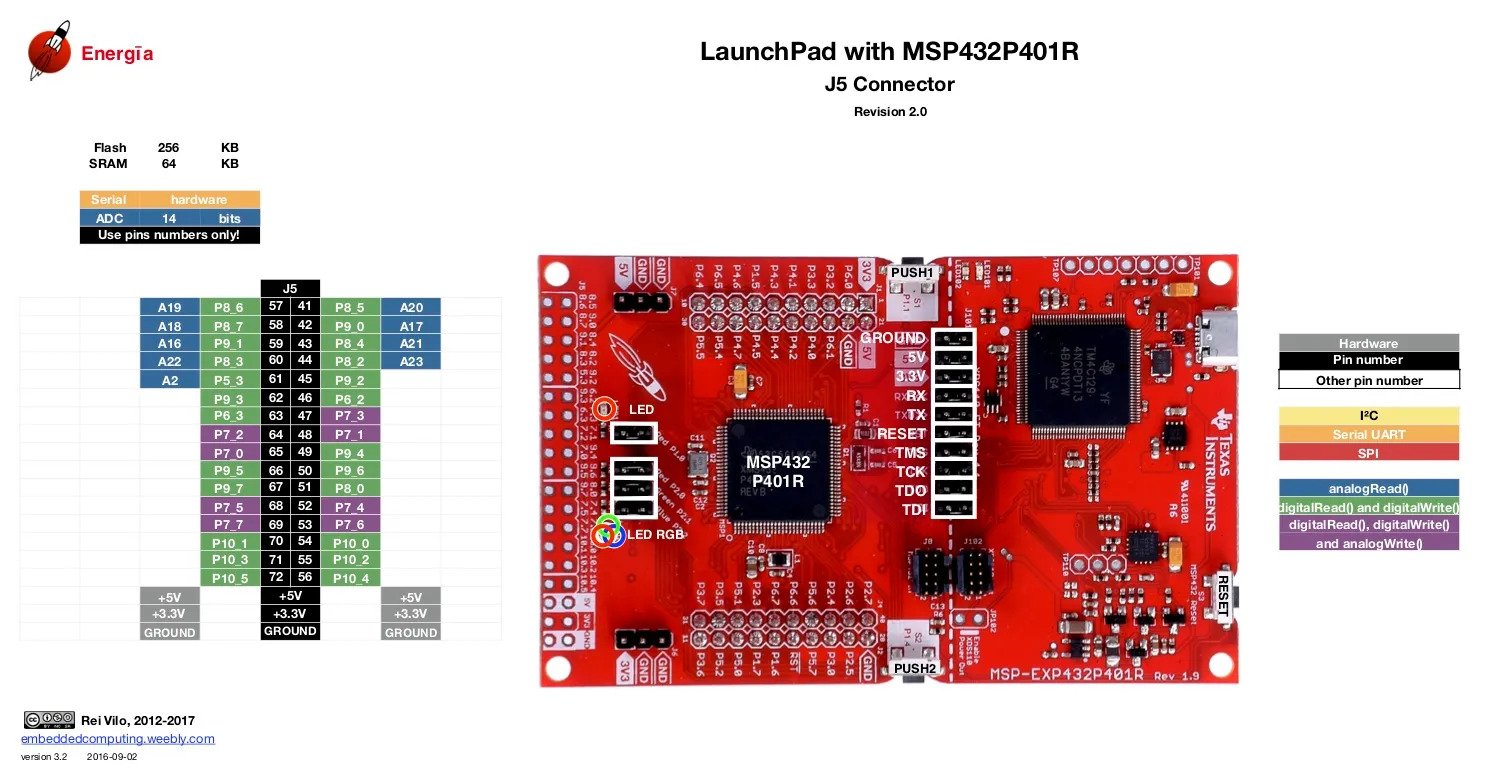
MSP432 Launchpad có 84 chân và với một số chân debugger, được chia thành 5 header. Tất cả các chân hỗ trợ nhiều loại giao thức và module truyền thông. Các module này nằm trong các chân GPIO được thảo luận bên dưới. Sơ đồ chân của MSP432 được hiển thị dưới đây:
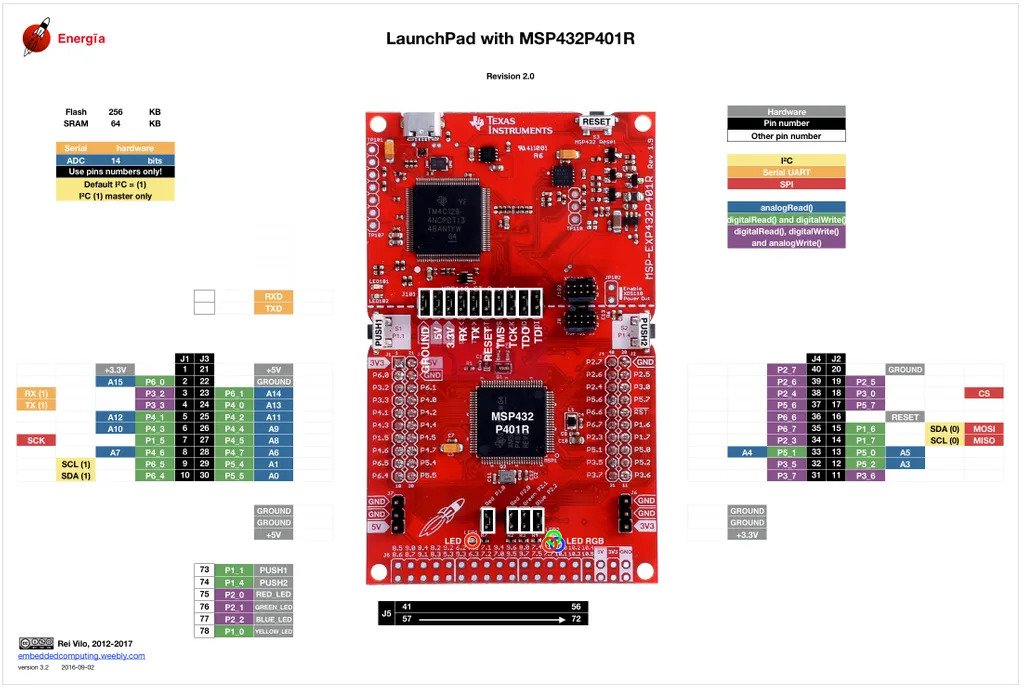
Các chân I/O digital là yêu cầu của mọi mạch và có nhiều chức năng được sử dụng nhiều nhất cho các cảm biến bên ngoài và thiết bị ngoại vi. Đôi khi, một lập trình viên cũng có thể viết hàm riêng bằng cách lập trình thông qua I / O.
Tất cả các chân I / O đều có một điện trở kéo bên trong. Xung logic thấp sẽ thay đổi trạng thái chân digital đầu vào. Tất cả các chân GPIO trong MSP432 là:
Bo mạch có một số chân giao tiếp dữ liệu nối tiếp hiện đại, có thể giao tiếp với nhiều thiết bị và cảm biến. Tất cả các giao thức truyền thông này và các chân được đưa ra dưới đây:
Giao tiếp UART là một trong những giao thức nối tiếp được sử dụng nhiều nhất hiện nay vì tính hiệu quả của nó. Giao tiếp UART chỉ sử dụng hai dây để giao tiếp và phần còn lại của giao tiếp phụ thuộc vào chương trình. Trong MSP432 có ba cách để giao tiếp UART.
Tất cả những chân này đều được kết nối và chỉ có một giao tiếp có thể sử dụng cho giao tiếp UART. Phụ thuộc vào cách chọn chân của người thiết kế.
Giao tiếp SPI còn được gọi là giao tiếp three-wire. Sử dụng bốn chân, MOSI, MISO, CS, SCK. Chân MOSI được gọi là Master out Slave in, được sử dụng để gửi dữ liệu từ bo mạch đến module bên ngoài.
Chân thứ hai MISO được gọi là Master in slave out, được sử dụng để gửi dữ liệu từ các module bên ngoài đến bo mạch. SCK là chân xung clock gửi và nhận dữ liệu. Chân CS là chân chọn chip, được sử dụng trong trường hợp có nhiều thiết bị.
Trong hầu hết các bo mạch và vi điều khiển, nó được xác định trước chỉ cho phép giao tiếp một module nhưng vẫn có thể thay đổi bằng cách chuyển đổi các chân I / O nào thông qua lập trình. Tất cả chân SPI của MSP432 là:
Các giao thức I2C cũng là một giao thức nối tiếp nhưng nó được gọi là phương pháp giao tiếp 2-wire. Hầu hết các thiết bị hoạt động chậm đều sử dụng giao tiếp I2C.
Trong I2C chỉ có hai dây được sử dụng, một dây cho xung clock và dây thứ hai cho dữ liệu. Chân xung clock giữ nhịp truyền đồng bộ dữ liệu giữa hai thiết bị.
Mọi vi điều khiển đều có giao thức I2C và MSP432 cũng có hai cổng giao tiếp I2C, một cổng là I2C (0) và cổng thứ hai là I2C (1).
Theo mặc định, I2C sử dụng I2C (1) nhưng để sử dụng I2C (0) thì chương trình phải được khai báo. Tất cả các chân I2C trong MSP432 là:
Mọi thiết bị điện tử đều hoạt động với dữ liệu digital nhưng ở thế giới thực bên ngoài thì ngược lại. Hầu hết các cảm biến cần đo giá trị tín hiệu analog nhưng không thể đọc được bởi hầu hết các thiết bị.
Để giải quyết vấn đề này, hầu hết các bộ vi điều khiển và bo mạch đều có các kênh chuyển đổi tín hiệu A / D. ADC nhận đầu vào digital và chuyển đổi sang digital, có thể được sử dụng trên bộ điều khiển.
Trong MSP432 có 24 kênh A / D và tất cả các kênh này đều là 14-bit. Bất kỳ dữ liệu analog nào cũng có thể được chuyển đổi thành 14-bit và tất cả các chân có thể được sử dụng cùng một lúc mà không ảnh hưởng đến dữ liệu khác. Tất cả các chân ADC trong MSP432 là:
Hầu hết tốc độ xử lý / điện áp của thiết bị có thể thay đổi bằng cách sử dụng PWM. Các chân PWM thay đổi tín hiệu đầu ra thành sóng xung vuông mong muốn bằng cách sử dụng bộ định thời và đặt thang đo giá trị bên trong.
Trong MSP432 có các chân PWM và tất cả các chân đều hoạt động riêng lẻ. PWM chỉ có thể điều khiển được thông qua lập trình. Tất cả PWM là:
USB
Cổng USB có thể được sử dụng để cấp nguồn cho bo mạch. Các chân nguồn của cổng USB được kết nối với 5V và 3V thông qua các JTAG. 3V được chuyển đổi với USB thông qua LDO. Trong trường hợp sử dụng USB để cấp nguồn, các chân có thể được sử dụng làm đầu ra nguồn.
5V
Chân 5V hầu hết được sử dụng làm đầu ra. Trong trường hợp sử dụng 5V, bộ vi điều khiển có thể được cấp nguồn thông qua các chân debugger nếu các jumper được kết nối. Nếu bo mạch bị chia thành hai phần thì không có cách nào hoạt động với 5V. Tất cả các header có ít nhất một chân 5V.
3V
Bộ vi điều khiển trong MSP432 sử dụng điện áp 3V để hoạt động. Nếu điện áp từ 1.8 - 3.7V được kết nối với bất kỳ chân 3V nào trong bo mạch thì bộ điều khiển sẽ hoạt động. Trong trường hợp sử dụng các phương pháp cấp nguồn đầu vào khác, chân 3V sẽ được sử dụng để nhận điện áp 3.3V.
GND
MSP432 có nhiều chân nối đất. Các chân nối đất có ở tất cả các header và ngay cả chân debugger.
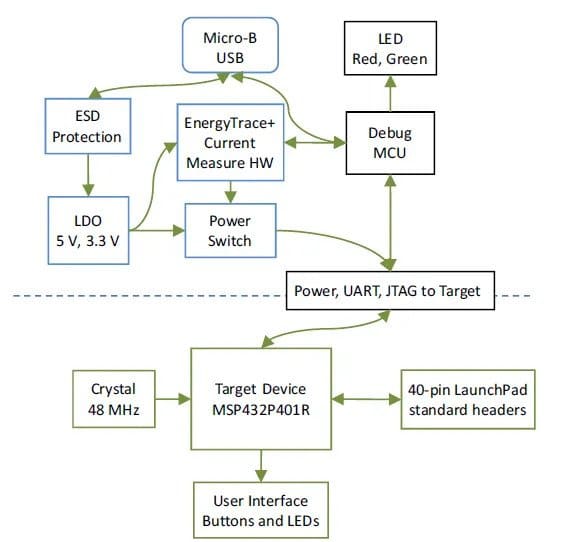
Xung nhịp là yêu cầu cơ bản để các vi điều khiển hoạt động và MSP432 có hai xung nhịp bên trong 48MHz và 32KHz. 48MHz giúp thiết bị xử lý ở tốc độ tối đa và 32KHz giúp thiết bị thực hiện các thao tác chính xác.
Sơ đồ khối cho thấy các cổng cơ bản và kết nối của bộ điều khiển trong MSP432.
| Tính năng & Thông số kỹ thuật | |
| Vi điều khiển | MCU MSP432P401R |
| Tần số CPU | 48 MHz |
| VDD (MCU) | Từ 1.8V đến 3.7V |
| ADC | 24 kênh 14bit |
| Timer watchdog | Có |
| UART | Có |
| I2C | 2 kênh |
| SPI | 1 kênh |
| Timer | 4 x 16-bit, 2 X 32-bit |
| USB | Có |
| LAN | Không có |
| Wifi | Không có |
| Bluetooth | Không có |
| Bộ dao động bên trong | 48MHz và 32KHz |
| Bộ dao động bên ngoài | Không có |
| Trình gỡ lỗi trên bo mạch | Có |
| Bộ nhớ flash | 256Kb |
| RAM | 64Kb |
MSP432 là một thiết bị tuyệt vời để điều khiển nhiều động cơ DC. Nó có nhiều chân PWM so với các bảng mạch khác
Trong hệ thống prototype, MSP432 là lựa chọn tốt nhất.
>>> Mời anh em xem thêm:





![[TOP 05] Review máy bắn vít Dewalt tốt nhất hiện nay (2023)](https://cms.mecsu.vn/uploads/media/2023/07/nen-chon-may-ban-vit-dewalt-nao-tot-630x420.jpg)
![[TOP 08] Review máy bắn vít Bosch tốt nhất hiện nay (2023)](https://cms.mecsu.vn/uploads/media/2023/07/nen-chon-may-ban-vit-bosch-nao-tot-630x420.jpg)

![[Tìm hiểu] Vi điều khiển ATMega32](https://cms.mecsu.vn/uploads/media/2023/07/vi-dieu-khien-atmega32-1-599x420.jpg)

.jpg)
