
![[2023] Pid là gì? Pid bao nhiêu khâu hiệu chỉnh (NÊN XEM)](https://cms.mecsu.vn/uploads/media/2023/07/khai-niem-pid-630x420.jpg)
PID được hiểu là một thuật toán giúp hệ thống máy móc có thể thay đổi giá trị sai lệch. Vậy PID là gì? Có bao nhiêu khâu hiệu chỉnh thông số PID? Nếu anh em muốn biết tất tần tật các kiến thức về PID hãy nên tham khảo trong bài viết này nhé:
PID là từ viết tắt của Proportional Integral Derivative là một bộ điều khiển vi tích phân tỉ lệ. Bộ điều khiển là sự kết hợp của vi phân, tích phân và tỉ lệ có khả năng hiệu chỉnh sai số ở mức thấp nhất. Thậm chí, nó còn có thể tăng tốc độ đáp ứng hoặc giảm độ vọt lố và hạn chế sự dao động.
Khi các tín hiệu sai số xảy ra do ảnh hưởng của tác động tỉ lệ và tích phân có khả năng giảm xuống ở mức thấp nhất. Sự tác động này được làm rõ với một tốc độ đạt được bằng với tác động vi phân số liệu trước đó. Đây được gọi là quá trình mà PID tham gia vào hành động xử lý tỉ lệ, tích phân và vi phân. Hệ thống được ứng dụng rộng rãi trong hệ thống điện, tự động hóa, điện tử,....
Năm 1980, bộ điều khiển PID bắt đầu xuất hiện trong các thiết kế của bộ điều tốc. Cho đến sau này, hệ thống mới được phát triển và ứng dụng trong hệ thống tàu thủy tự động được gọi là PID Controller. Với khái niệm này được hình thành vào năm 1911 bởi nhà phát minh người Mỹ là Elmer Sperry.
Đến năm 1922, tác phẩm nói về bộ điều khiển PID của tác giả Nicolas Minorsky mới chính thức xuất bản lần đầu tiên. Đây là một trong những cuốn sách mô tả khá chi tiết về khái niệm bộ điều khiển PID. Dựa vào sự quan sát thực tế với những hành vi của các thủy thủ lái tàu thủy mà ông đã viết nên tác phẩm này. Ngày nay, tác phẩm của ông vẫn rất được hữu dụng trong đời sống xã hội.
Như đã biết, PID là cụm từ viết tắt của Proportional Integral Derivative được chia sẻ trên đây. Vậy anh em có biết ý nghĩa của từng chữ này là gì không? Nếu chưa thì hãy tham khảo thông tin dưới đây để có thể hiểu được PID một cách đơn giản nhất. Cụ thể:
Đây được gọi là phương pháp điều chỉnh tỉ lệ. Nó có thể tạo tín hiệu nhằm điều chỉnh tỉ lệ và sai lệch đầu vào với thời gian lấy mẫu.
Đây được gọi là phương pháp điều khiển tích phân. Nó thực hiện bằng cách tạo và điều chỉnh tín hiệu cho độ sai lệch giảm về 0. Với thời gian càng nhỏ thì việc hiệu chỉnh tích phân càng mạnh, đồng thời độ lệch càng nhỏ.
Đây được gọi là phương pháp điều khiển vi phân. Nó giúp tạo và điều chỉnh tín hiệu sao cho tỉ lệ với tốc độ thay đổi sai lệch ở đầu vào. Khác với phương pháp trên, thời gian càng lớn thì việc hiệu chỉnh vi phân càng mạnh, đồng thời sự thay đổi đầu vào càng nhanh.
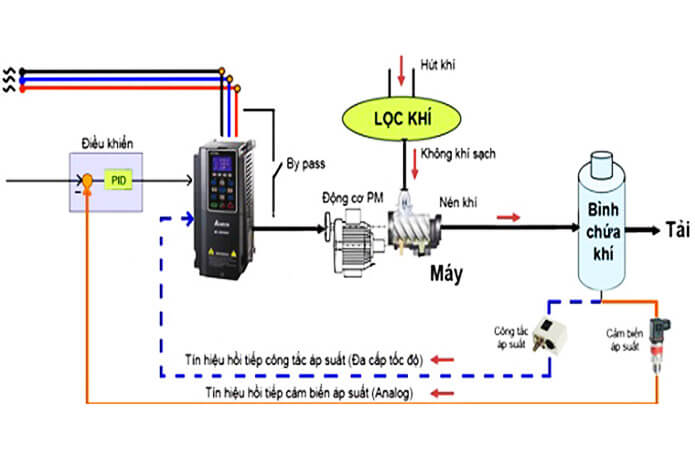
Việc dùng PID thường rất được ưa chuộng trong các ngành công nghiệp hiện nay. Nó có thể ứng dụng điều khiển trong quá trình tự động, điều chỉnh lưu lượng, nhiệt độ,...Với PID, hệ thống sẽ giúp máy công nghệ tính toán ra các giá trị sai số giữa giá trị đo và giá trị theo mong muốn của người dùng.
Thông qua việc điều chỉnh giá trị điều khiển mà nhờ đó hệ thống PID có thể hạn chế độ dao động. Đồng thời, nó có thể giảm tối đa những sai số cho hoạt động có độ chính xác cao hơn. Mặt khác, hệ thống còn được sử dụng nhằm làm giảm thời gian xác lập và độ vọt lố giúp mang lại hiệu quả cao nhất khi làm việc.
Ví dụ: Khi điều khiển lò nung ở nhiệt độ bình thường, anh em cần cài đặt nhiệt độ là 38 độ C. Và khi đạt đến mức nhiệt độ này thì hệ thống sẽ tự động ngắt nhiệt độ. Tuy nhiên với cách làm này sẽ có sự sai số lớn. Vì vậy, người ta sử dụng PID để điều chỉnh tại đầu ra sao cho giá trị cài đặt sai số giảm về 0 để tạo sự ổn định nhiệt độ trong lò nung.
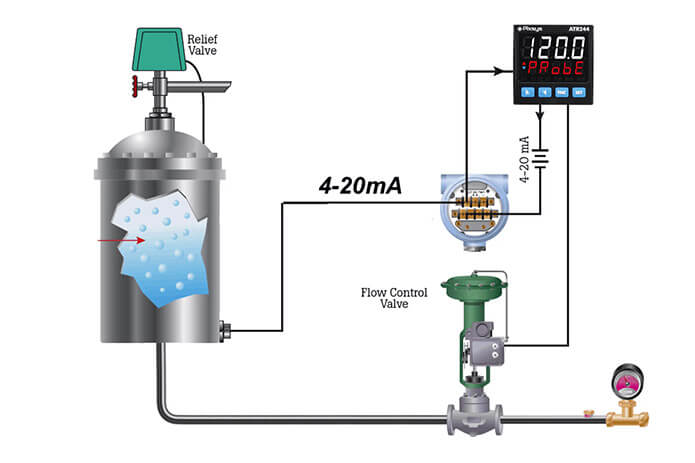
Với câu hỏi “ Tại sao anh em nên điều khiển PID” hãy nên tìm hiểu hai trường hợp khác nhau sau đây. Các trường hợp đều dựa trên bài toán về kiểm soát nhiệt độ nước xả từ lò sưởi đốt bằng khí gas công nghiệp. Cụ thể:
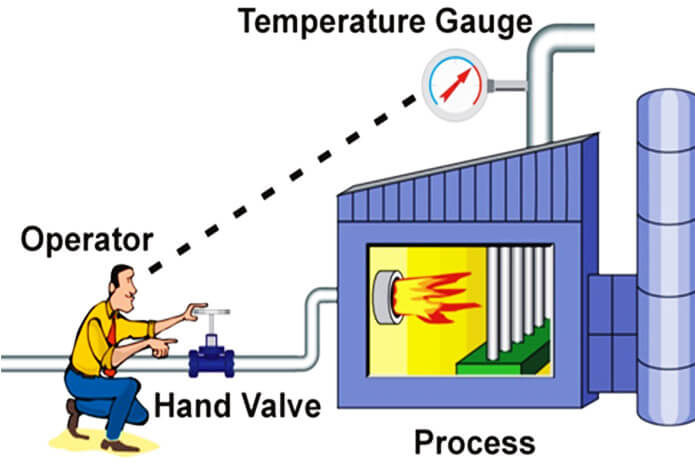
Việc kiểm soát bằng thủ công, người vận hành phải theo dõi đồng hồ đo nhiệt độ và điều chỉnh van gas nhiên liệu cho phù hợp. Điều này dẫn đến hai trường hợp như sau:
Đây được gọi là nhiệm vụ điều khiển phản hồi theo cơ chế thủ công. Bởi người vận hành sẽ dựa trên tình trạng phản hồi để thay đổi tốc độ đốt nguyên liệu. Sự thay đổi của người vận hành van gas đều ảnh hưởng đến nhiệt độ của lò sưởi.
Khác với phương pháp thủ công, anh em có thể kiểm soát nhiệt độ của lò sưởi đốt gas công nghiệp bằng cách sử dụng bộ điều khiển PID. Hệ thống điều khiển PID sẽ hoạt động theo cách tự động như sau:
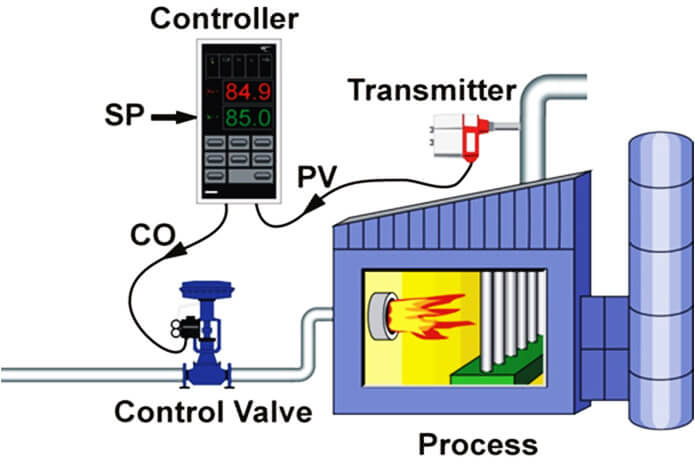
Khi ứng dụng bộ điều khiển PID, người vận hành chỉ cần thiết lập tham số điểm đặt ở nhiệt độ mong muốn và đầu ra là đặt giá trị góc mở van. Hệ thống sẽ tự động cảm biến nhiệt độ rồi truyền đến bộ điều khiển PID. Sau đó, PID bắt đầu tiến hành công việc đối sánh giá trị sai số và hiệu chỉnh sao cho chính xác như giá trị tại điểm đặt ban đầu.
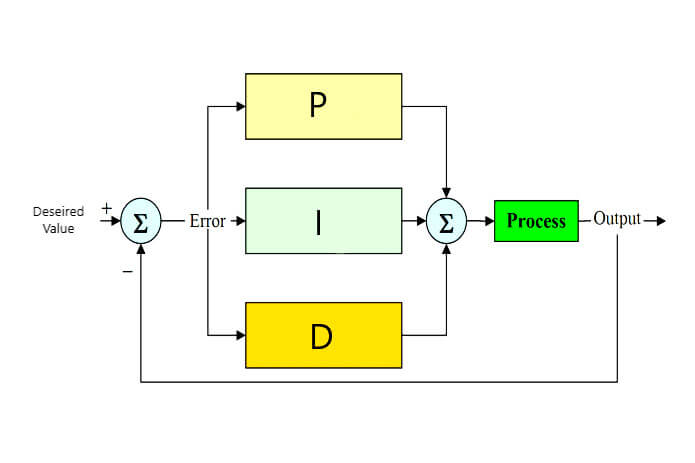
Một sơ đồ hiệu chỉnh của PID sẽ bao gồm 3 khâu với tổng khâu tỷ lệ, khâu phân tích và khâu vi phân. Nó tạo thành các biến điều khiển được ký hiệu là MV và có công thức cụ thể đó là:
MV(t) = P(out) + I(out) + D(out)
Với các giá trị P, I, D là những thành phần đầu ra của ba khâu đầu ra điều chỉnh PID. Để hiểu hơn từng khâu trong bộ điều khiển PID, anh em có thể tham khảo như sau:
Ở khâu tỷ lệ, người ta thường hay gọi khâu này là độ lợi và có tỷ lệ với giá trị sai số. Với chức năng chính là làm thay đổi giá trị đầu ra nên anh em có thể điều chỉnh độ lợi để đáp ứng nhu cầu về tỷ lệ. Khâu sẽ được tính bằng cách nhân sai số với một hằng số và có công thức như sau:
P(out) = Kp.e.t
Trong đó:
Đối với những trường hợp là tỷ lệ thuần túy tức là không có nhiễu trong quá trình điều khiển tỷ lệ. Nó được gọi với tên khác là độ trượt có nhiệm vụ duy trì sai số ở trạng thái ổn định. Hiểu đơn giản thì độ trượt là một hàm của độ lợi tỷ lệ và độ lợi trong quá trình hoạt động. Người ta giảm độ trượt bằng cách áp dụng thêm một thừa số về độ lệch.
Với khâu phân tích, nó thường tỉ lệ thuận với biên độ sai số và quãng thời gian xảy ra. Nói cách khác thì nó cho chúng ta thấy được tích lũy bù được hiệu chỉnh trước đó thông qua tổng sai số tức thời. Với sự tích lũy sai số sẽ nhân với độ lợi tích phân và cộng thêm tín hiệu đầu ra của PID sẽ có công thức như sau:
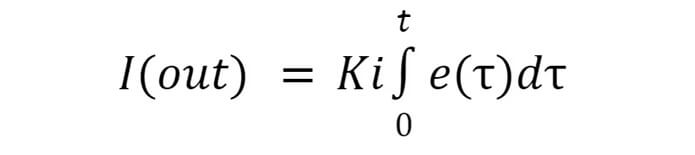
Trong đó:
Khi anh em cộng thêm vào khâu tỷ lệ sẽ khiến cho tốc độ chuyển động tăng tốc và khử số dư sai số ổn định. Điều này sẽ làm cho giá trị hiện tại khi qua khâu tích phân đáp ứng sai số tích lũy trước đây.
Tại khâu vi phân, người ta xác định độ dốc của sai số chính là xác định đạo hàm theo một thời gian cụ thể nhân với độ lợi tỷ lệ. Với biên độ của khâu vi phân được tính thông qua hành vi điều khiển giới hạn bởi độ vi phân theo công thức tính như sau:
D(out) = Kd(d/dt)e
Trong đó:
Để làm thay đổi khâu vi phân thì người ta sẽ làm chậm tốc độ đầu ra của bộ điều khiển sao cho đạt tới điểm đặt chuẩn. Điều này giúp cho bộ điều khiển ở khâu vi phân có thể giảm biên độ vọt lố giúp tăng cường sự ổn định của bộ điều khiển hỗn hợp.
Mặt khác, quá trình này cũng thường xuất hiện tín hiệu khuếch đại nhiễu nên khâu vi phân nhạy cảm hơn. Nhờ đó mà bộ vi sai bằng thông giới hạn được người ta sử dụng nhiều lần trong quá trình này.
Với phương pháp này, anh em lấy giả thuyết với giá trị Ki = Kd đồng thời quy về giá trị = 0. Khi đó, Kp được hiệu chỉnh ở mức độ tăng dần cho đến khi hệ thống ổn định thì dừng lại.
Lúc này, anh em hãy nên hiệu chuẩn thời gian tích phân sao cho tương ứng với chu kì dao động tuần hoàn và kiểm soát giá trị Kp khớp với yêu cầu bài toán. Trường hợp xuất hiện hiện tượng dao động đột biến cần phải tiếp tục hiệu chuẩn cho đến khi ổn định.
Ziegler là một trong những phương pháp điều khiển PID được xem là hữu dụng nhất hiện nay. Tương tự như chọn PID bằng tay, anh em cho Ki = Kd với giá trị đưa về = 0 rồi hiệu chỉnh tiếp tục tăng Kp (khi Kp là Kc). Tuy nhiên với cách làm trên anh em chỉ cần đếm chu kỳ dao động Pc là được.
Khi chọn PID sử dụng phần mềm được xem là phương pháp tối ưu và có độ chính xác cao. Anh em có thể áp dụng các thuật toán điều khiển hiệu chỉnh với phần mềm trong mô hình thực nghiệm PID ảo là hoàn thành xong cách chọn thông số PID.
>>> 4500+ Mã Sản Phẩm Mũi Khoan : https://mecsu.vn/san-pham/mui-khoan.NYMg
>>> 3100+ Mã Sản Phẩm Mũi Taro Ren: https://mecsu.vn/san-pham/mui-taro-ren.x19
Mời anh em đọc thêm:
Một số thông tin cần thiết về bộ điều khiển PID hy vọng giúp ích các anh em trong công việc của mình. Với anh em nào còn thắc mắc về giá trị PID có thể bình luận dưới bài viết để Mecsu nhanh chóng giải đáp thắc mắc ngay.








![[2023] Bức xạ điện từ là gì? Các loại bức xạ điện từ cần biết](https://cms.mecsu.vn/uploads/media/2023/07/cach-phong-tranh-buc-xa-dien-tu-630x420.jpg)
![[2023] Feeler Gauge là gì? Có bao nhiêu loại Feeler Gauge? (NÊN XEM)](https://cms.mecsu.vn/uploads/media/2023/07/thuoc-la-dang-cuon-630x420.jpg)
![[2023] Cân bằng động là gì? Cân bằng động trong bánh xe](https://cms.mecsu.vn/uploads/media/2023/07/huong-dan-su-dung-may-can-bang-dong-o-to-630x420.jpg)
![Kích thước cờ lê tiêu chuẩn cho từng loại [CHUẨN 2023]](https://cms.mecsu.vn/uploads/media/2023/07/kich-thuoc-cac-loai-co-le-630x420.jpg)

.jpg)
