
Mô-đun MPU6050 là Hệ thống cơ điện vi mô (MEMS) bao gồm Gia tốc kế 3 trục và Con quay hồi chuyển 3 trục bên trong nó. Điều này giúp chúng ta đo gia tốc, vận tốc, định hướng, độ dịch chuyển và nhiều thông số liên quan đến chuyển động khác của một hệ thống hoặc vật thể.
| Pin Number | Pin Name | Description |
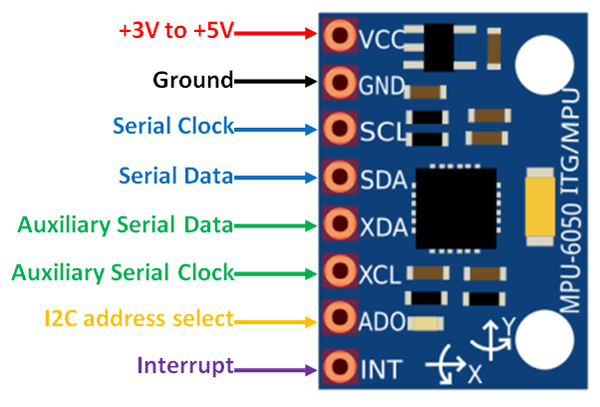
| 1 | Vcc | Cung cấp nguồn cho module, có thể là + 3V đến + 5V. Thông thường + 5V được sử dụng |
| 2 | Ground | Kết nối với mặt đất của hệ thống |
| 3 | Đồng hồ nối tiếp (SCL) | Được sử dụng để truyền dữ liệu thông qua giao tiếp I2C |
| 4 | Dữ liệu nối tiếp (SDA) | Có thể được sử dụng để giao tiếp các mô-đun I2C khác với MPU6050. Nó là tùy chọn |
| 5 | Dữ liệu nối tiếp phụ trợ (XDA) | Có thể được sử dụng để giao tiếp các mô-đun I2C khác với MPU6050. Nó là tùy chọn |
| 6 | Đồng hồ nối tiếp phụ (XCL) | Có thể được sử dụng để giao tiếp các mô-đun I2C khác với MPU6050. Nó là tùy chọn |
| 7 | AD0 | Nếu nhiều hơn một MPU6050 được sử dụng một MCU, thì chân này có thể được sử dụng để thay đổi địa chỉ |
| 8 | Ngắt (INT) | Chân ngắt để chỉ ra rằng dữ liệu có sẵn cho MCU để đọc. |
Các tính năng và thông số kỹ thuật khác được tìm thấy trong biểu dữ liệu MPU6050 đính kèm ở cuối bài viết.
ADXL335 (gia tốc kế 3 trục), ADXL345 (gia tốc kế 3 trục), MPU9250 (IMU 9 trục)
MPU6050 là Hệ thống cơ điện tử vi mô (MEMS) bao gồm Gia tốc kế 3 trục và Con quay hồi chuyển 3 trục bên trong nó. Điều này giúp chúng ta đo gia tốc, vận tốc, định hướng, độ dịch chuyển và nhiều thông số liên quan đến chuyển động khác của một hệ thống hoặc vật thể. Mô-đun này cũng có Bộ xử lý chuyển động kỹ thuật số (DMP) bên trong nó đủ mạnh để thực hiện các phép tính phức tạp và do đó giải phóng công việc cho Vi điều khiển.
Mô-đun cũng có hai chân phụ có thể được sử dụng để giao tiếp với các mô-đun IIC bên ngoài như một từ kế, tuy nhiên nó là tùy chọn. Vì địa chỉ IIC của mô-đun có thể định cấu hình nên nhiều cảm biến MPU6050 có thể được giao tiếp với Bộ vi điều khiển bằng chân AD0. Mô-đun này cũng có sẵn các thư viện được tài liệu hóa và sửa đổi tốt, do đó nó rất dễ sử dụng với các nền tảng nổi tiếng như Arduino. Vì vậy, nếu bạn đang tìm kiếm một cảm biến để điều khiển chuyển động cho Xe RC, Máy bay không người lái, Robot tự cân bằng, Hình người, Biped hoặc những thứ tương tự thì cảm biến này có thể là lựa chọn phù hợp cho bạn.
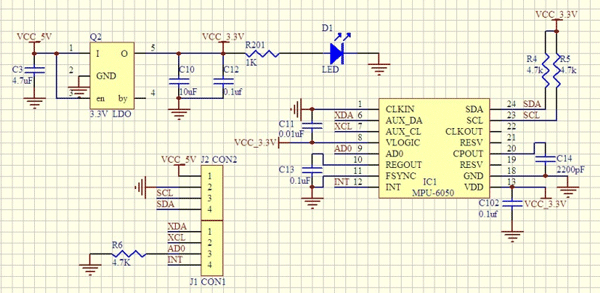
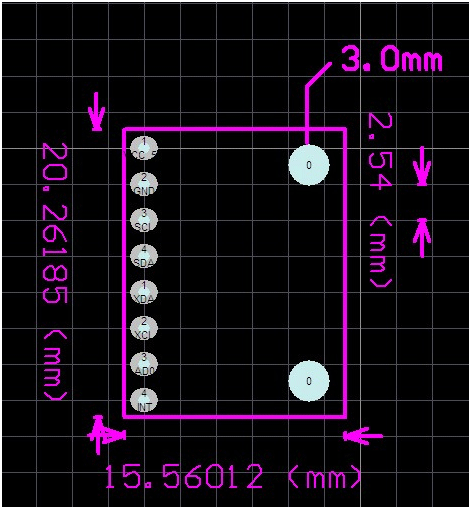
Phần cứng của mô-đun rất đơn giản, nó thực sự bao gồm MPU6050 như các thành phần chính như được hiển thị ở trên. Vì mô-đun hoạt động trên 3.3V, một bộ điều chỉnh điện áp cũng được sử dụng.
Các đường IIC được kéo lên cao bằng cách sử dụng một điện trở 4,7k và chân ngắt được kéo xuống bằng cách sử dụng một điện trở 4,7k khác.
Mô-đun MPU6050 cho phép chúng tôi đọc dữ liệu từ nó thông qua bus IIC. Bất kỳ sự thay đổi nào trong chuyển động sẽ được phản ánh trên hệ thống cơ học, hệ thống này sẽ thay đổi điện áp.
Sau đó, vi mạch có một bộ ADC 16-bit mà nó sử dụng để đọc chính xác những thay đổi này về điện áp và lưu trữ nó trong bộ đệm FIFO và làm cho chân INT (ngắt) ở mức cao. Điều này có nghĩa là dữ liệu đã sẵn sàng để đọc, vì vậy chúng tôi sử dụng MCU để đọc dữ liệu từ bộ đệm FIFO này thông qua giao tiếp IIC.
Nghe thì có vẻ dễ dàng nhưng bạn có thể gặp phải một số vấn đề trong khi thực sự cố gắng hiểu dữ liệu. Tuy nhiên, có rất nhiều nền tảng như Arduino đang sử dụng mà bạn có thể bắt đầu sử dụng mô-đun này ngay lập tức bằng cách sử dụng các thư viện sẵn có được giải thích bên dưới.
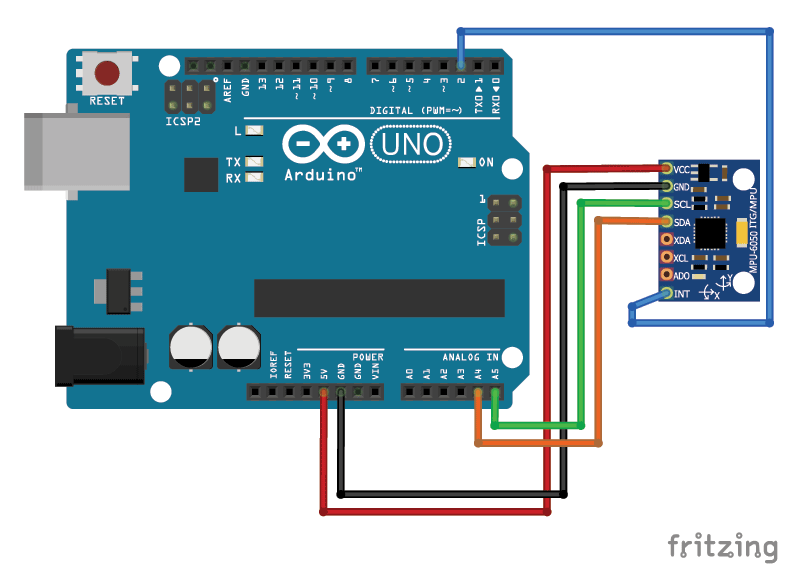
Rất dễ dàng giao tiếp MPU6050 với Arudino, nhờ vào thư viện do Jeff Rowberg phát triển. Bạn có thể tải xuống thư viện từ liên kết bên dưới
Khi bạn đã thêm thư viện này vào Arduino IDE, hãy làm theo các sơ đồ dưới đây để thiết lập kết nối IIC giữa Arduino và MPU6050 của bạn.
Thư viện cung cấp hai chương trình ví dụ, có thể tìm thấy tại Tệp -> Ví dụ -> MPU6050. Trong hai ví dụ này, một sẽ cung cấp các giá trị thô trong khi ví dụ kia sẽ cung cấp các giá trị được tối ưu hóa bằng cách sử dụng DMP. Các giá trị dữ liệu sau có thể được lấy bằng cách sử dụng chương trình ví dụ này.
Trong số tất cả các dữ liệu này, chúng tôi thường sử dụng Yaw, Pitch, Roll. Tuy nhiên, thư viện có khả năng thực hiện nhiều hơn thế và có thể được sử dụng cho các mục đích khác nhau. Sau khi chương trình được tải lên, hãy mở màn hình nối tiếp và đặt nó thành tốc độ truyền 115200 và bạn sẽ thấy dữ liệu được in trên màn hình.
>>> 1000+ Mã Sản Phẩm của thương hiệu Bosch: https://mecsu.vn/thuong-hieu/bosch
>>> 350+ Mã Sản Phẩm của thương hiệu Sata: https://mecsu.vn/thuong-hieu/sata
>> Mời anh em xem thêm








![[Kiến thức] Động cơ Servo MG996R](https://cms.mecsu.vn/uploads/media/2023/07/dong-co-servo-mg996r-2.png)
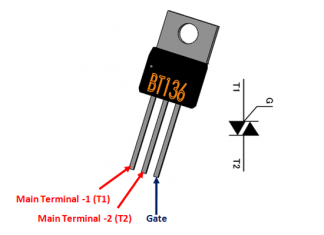
![[Kiến thức] Transistor công suất NPN 2SC5200](https://cms.mecsu.vn/uploads/media/2023/07/transistor-cong-suat-npn-2sc5200-2.png)

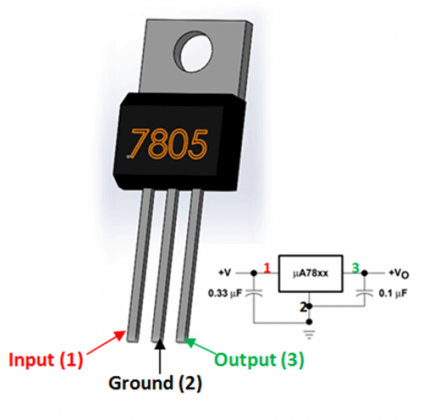
.jpg)
