TMC2130 là một trình điều khiển động cơ tích hợp dành riêng cho động cơ bước hai pha điện áp cao với giao diện SPI và STEP / DIR.
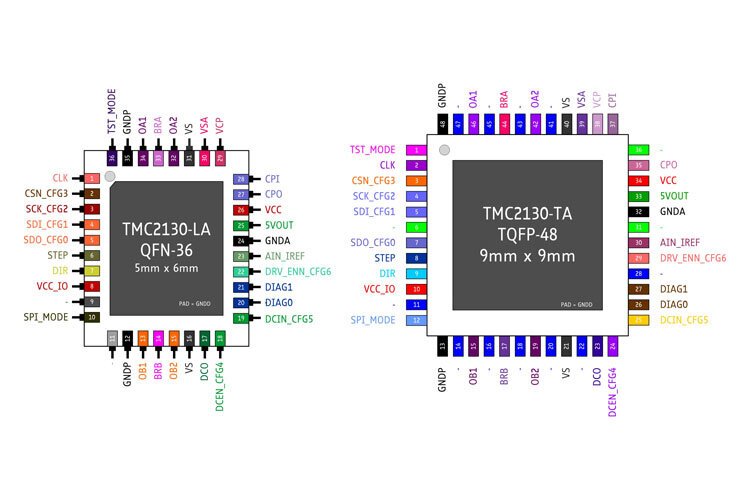
| Số pin (QFN36) | Số pin (TQFP48) | Tên ghim | Ghim Mô tả |
| 1 | 2 | CLK | Ngõ vào CLK, kết nối với mặt đất cho đồng hồ bên trong |
| 2 | 3 | CSN | Đầu vào chọn chip SPI |
| 3 | 4 | SCK | Đồng hồ nối tiếp SPI |
| 4 | 5 | SDI | Đầu vào dữ liệu SPI |
| 5 | 7 | SDO | Đầu ra dữ liệu SPI |
| 6 | 8 | STEP | Đầu vào STEP |
| 7 | 9 | DI | Đầu vào DIR |
| số 8 | 10 | VCC_IO | Nguồn cung cấp IO cho tất cả các chân kỹ thuật số, 3.3V đến 5V |
| 9 | 11, 14, 16, 18, 20 22, 28, 41, 43, 45, 47 | NC | Không kết nối |
| 10 | 12 | SPI_MODE | Chọn chế độ chân SPI |
| 11 | 6, 31, 36 | NC | Kết nối với mặt đất |
| 12, 35 | 13, 48 | GNDP | Power GND |
| 13 | 15 | OB1 | Cuộn dây động cơ B đầu ra 1 |
| 14 | 17 | BRB | Cuộn dây cảm giác B điện trở |
| 15 | 19 | OB2 | Cuộn dây động cơ B đầu ra 2 |
| 16, 31 | 21, 40 | VS | Điện áp cung cấp động cơ |
| 17 | 23 | DCO | dcStep đầu ra sẵn sàng |
| 18 | 24 | DCEN | đầu vào kích hoạt dcStep |
| 19 | 25 | CỔNG DC | Đầu vào gating dcStep |
| 20 | 26 | DIAG0 | Kết quả chẩn đoán |
| 21 | 27 | DIAG1 | Kết quả chẩn đoán |
| 22 | 29 | DRV_ENN | Bật đầu vào |
| 23 | 30 | AIN_IREF | Tham chiếu tương tự |
| 24 | 32 | GNDA | GND tương tự |
| 25 | 33 | 5VOUT | Đầu ra 5V |
| 26 | 34 | VCC | Đầu vào 5V |
| 27 | 35 | CPO | Sạc đầu ra tụ điện của máy bơm |
| 28 | 37 | CPI | Sạc đầu vào tụ điện bơm |
| 29 | 38 | VCP | Sạc điện áp bơm |
| 30 | 39 | VSA | Nguồn cung cấp tương tự |
| 32 | 42 | OA2 | Cuộn dây động cơ A đầu ra 2 |
| 33 | 44 | BRA | Cuộn dây cảm giác B điện trở |
| 34 | 46 | OA1 | Cuộn dây động cơ A đầu ra 1 |
| 36 | 1 | TST_MODE | Đầu vào chế độ kiểm tra |
| - | - | Die Pad | Kết nối với GND |
TMC2100, TMC2208, TMC5160
DRV8825, L298, L293
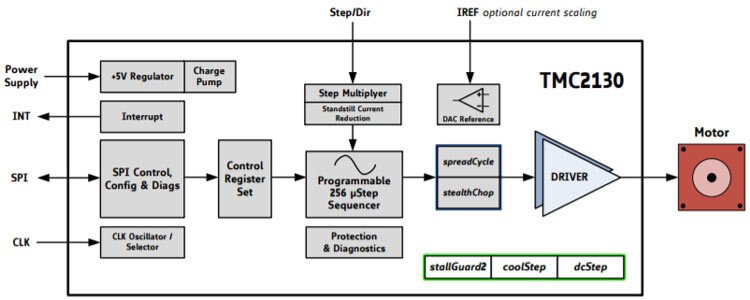
TMC2130 là trình điều khiển động cơ bước 2 pha có khả năng cung cấp lên đến 2A. Nó có thể giao tiếp với bộ vi điều khiển bên ngoài thông qua giao diện SPI và STEP / DIR.
Nó cũng tích hợp các chức năng độc quyền như:
1. Chế độ trình điều khiển STEP / DIR
Một bộ vi điều khiển bên ngoài tạo ra các tín hiệu BƯỚC và HƯỚNG.
Đầu vào STEP ở dạng xung điều khiển chuyển động của động cơ và tín hiệu DIR cho biết hướng chuyển động.
2. Chế độ độc lập
Không cần bộ vi điều khiển bên ngoài và quá trình di chuyển được thực hiện bằng cách sử dụng đầu vào STEP và DIR. Cấu hình được thực hiện thông qua các chân phần cứng.
3. Chế độ trình điều khiển SPI
Hoạt động ở chế độ này được kết hợp với IC TMC4361 để cung cấp toàn quyền kiểm soát dòng điện của động cơ.
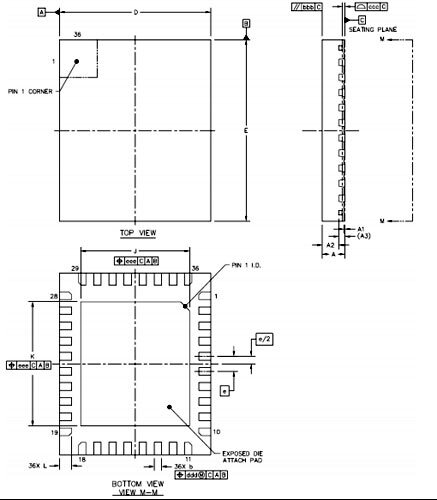
Nếu bạn đang thiết kế bảng mạch PCB hoặc bảng Perf với thành phần này thì hình ảnh sau đây từ Biểu dữ liệu sẽ hữu ích để biết loại gói và kích thước của nó.
>> Mời anh em xem thêm