

Có nhiều loại chuyển động mà chúng ta phải đối mặt trong cuộc sống hàng ngày, một số là chuyển động thẳng, một số là chuyển động quay. Cả hai chuyển động đều có tầm quan trọng đối với máy móc và trong cuộc sống của chúng ta.
Vào thế kỷ 19, nhà khoa học bắt đầu khám phá / phát minh ra một số cách tạo ra dòng điện và chuyển động khi nhà vật lý người Anh John Ambrose Fleming phát minh ra quy tắc bàn tay phải.
Quy tắc bàn tay phải được phát minh vào thế kỷ 19 và cho rằng thể tạo ra dòng điện bằng cách kết hợp giữa từ trường và chuyển động bằng cách tuân theo một số quy tắc. Nó cũng cho thấy rằng có thể tạo ra từ trường và chuyển động bằng cách kết hợp một trong số chúng với dòng điện.
Sau khi phát minh ra quy tắc bàn tay phải, động cơ điện một chiều được phát minh bởi nhà khoa học người Anh William Sturgeon. Động cơ điện một chiều là động cơ đầu tiên được nhà khoa học sử dụng để biến đổi dòng điện thành chuyển động quay.
Động cơ DC vào cuối thế kỷ 19 đã có cách sử dụng riêng nhưng sau khi Nikola Tesla phát hiện ra động cơ xoay chiều và dòng điện xoay chiều được sử dụng trong công nghiệp và nhà ở. Việc sử dụng động cơ AC đã trở nên rất phổ biến trong thế kỷ 20. Nhưng sau khi phát minh ra IC, động cơ DC lại bắt đầu trở nên phổ biến.
Mọi động cơ AC và DC đều có khả năng quay theo cả hai chiều. Động cơ AC có các quy tắc và cách sử dụng riêng, nhưng động cơ DC có thể quay theo hướng khác chỉ bằng cách thay đổi cực của dòng điện. Ngày nay, hầu hết các Động cơ DC được sử dụng để tạo ra chuyển động quay do có hiệu suất cao.
Nhưng ở một số trường hợp, cần quay động cơ theo cả hai chiều. Như rô bốt, ô tô, v.v. Có nhiều mạch động cơ có thể quay theo cả hai hướng bằng cách sử dụng một số diode và transistor. Nhưng những mạch đó rất phức tạp để chế tạo.
Để tránh sự phức tạp và IC l293D đã được phát minh ra mà không chỉ có chức năng điều khiển hướng, nhiều chức năng khác có thể đạt được chỉ trong nháy mắt.
IC L293D được biết đến như bộ điều khiển động cơ. Là một thiết bị hoạt động với điện áp thấp như các IC khác. Các IC khác có thể có chức năng tương tự như L293D nhưng chúng không thể cấp điện áp cao cho động cơ.
L293D cấp Dòng điện một chiều liên tục cho động cơ. Dòng điện phân cực có thể thay đổi bất cứ lúc nào mà không ảnh hưởng đến IC hoặc bất kỳ linh kiện khác trong mạch. L293D có một mạch H-bridge bên trong được lắp đặt cho hai động cơ.
H-Bridge là mạch điện điều khiển tải theo hai chiều được điều khiển bằng tín hiệu điện áp thấp bên ngoài. Có kích thước nhỏ, nhưng công suất phát điện cao. Có thể điều khiển với bất kỳ tốc độ và hướng động cơ DC với dải điện áp 4,5 - 36 V.
Để điều khiển dòng điện tối đa 600mA, một sink transistor Darlington được lắp bên trong, được sử dụng để điều khiển dòng điện cao bằng cách cấp dòng điện nhỏ. Nó cũng có 1 pseudo-Darlington bên trong giúp khuếch đại tín hiệu đầu vào để điều khiển động cơ DC điện áp cao mà không có sự cản trở.

| Chân 1 (Enable) | Là chân cho phép hoạt động. Nếu có tín hiệu logic cao cấp vào chân này thì sẽ có tín hiệu đầu vào và đầu ra giữa chân 2,3,6 & 7 (Input 1, Output 1, Input 2 & Ouput 2) | |
| Chân 2 (Input 1) | Chân cấp nguồn cho Output 1 | |
| Chân 3 (Output 1) | Đầu ra 1 là đầu vào cho động cơ đầu tiên / Động cơ 1. | |
| Chân 4 (Ground) | Chân nối đất mắc mass của mạch. | |
| Chân 5 (Ground) | Chốt nối đất mắc vào mass. | |
| Chân 6 (Output 2) | Đầu ra 2 được mắc vào động cơ thứ nhất / Động cơ 1. | |
| Chân 7 (Input 2) | Đầu vào 2 mắc với nút điều khiển hoặc linh kiện điều khiển để điều khiển Đầu ra 2 như Đầu vào 1. | |
| Chân 8 (Vcc ) | Chân8 là chân điện áp cho Motor. Không được lớn hơn 36V và không được nhỏ hơn 4,5V. | |
| Chân 9 (Enable) | Chân 9 giống như Chân 1 điều khiển tín hiệu đầu vào và đầu ra. Chân 9 Điều khiển kết nối giữa Input 3, Input 4, Output 3 và Output 4. Kích hoạt với mức tín hiệu logic cao (1). | |
| Chân 10 (Input 3) | Đầu vào 3 điều khiển cực đầu ra của Chân 11 (Ouput 3) bằng các tín hiệu logic. | |
| Chân 11 (Ouput 3) | Đầu ra 3 sẽ mắc vào một đầu của động cơ thứ hai. | |
| Chân 12 (Ground) | Chân số 12 sẽ nối mass | |
| Chân 13 (Ground) | Chân số 13 được nối mass | |
| Chân 14 (Ouput 4) | Chân 14 sẽ mắc vào đầu thứ hai của động cơ thứ hai. | |
| Chân 15 (Input 4) | Chân 15 điều khiển cực đầu ra của Chân 14 (Output 4) bằng các tín hiệu logic. | |
| Chân 16 (Vcc ) | Là chân cấp nguồn cho L293D để kích hoạt hoặc để bật nó lên. Điện áp hoạt động từ 4,5 - 7V. Điện áp quá 7V sẽ làm cháy IC |
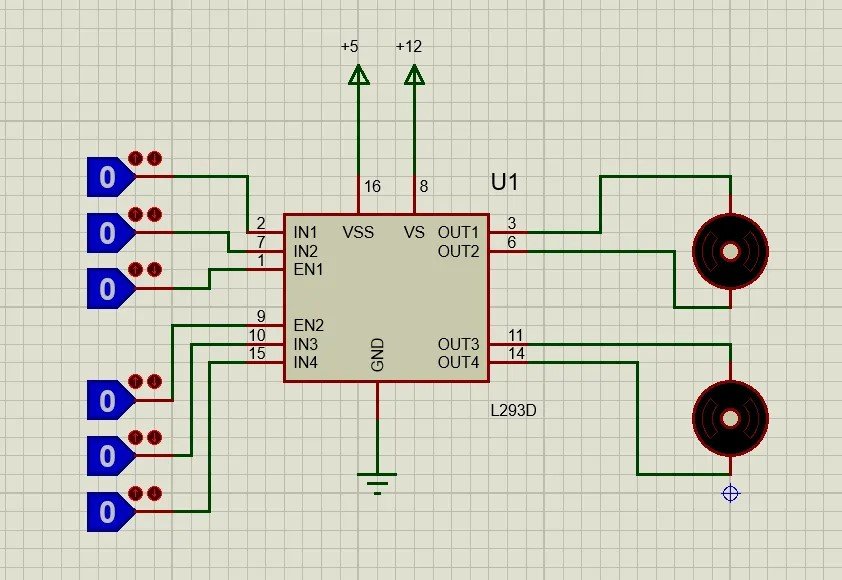
L293D có mạch phức tạp bên trong, nhưng rất dễ sử dụng. Chỉ cần mắc hai động cơ vào các chân đầu ra. Hãy nhớ rằng ở đầu ra 1 và đầu ra 2 phải kết nối cùng một động cơ và tương tự với động cơ 2 ở đầu ra 3 và đầu ra 4. Tất cả các điểm nối đất phải chung với nguồn điện cấp cho IC. Các chân enable điều khiển các đầu ra nhưng khi sử dụng bộ vi điều khiển hoặc bộ vi xử lý, các chân này có thể điều khiển tốc độ của động cơ.
Các chân Input có vai trò chính là điều khiển hướng quay của động cơ. Nếu Input 1 (Chân 2) có mức logic cao và chân enable (Chân 1) ở mức cao nhưng Input 2 (Chân 7) ở mức thấp thì động cơ (được mắc với chân 3 và 6) sẽ quay theo chiều kim đồng hồ. Vòng quay sẽ ngược chiều kim đồng hồ khi Input 2 (Chân 7) & Enable (Chân 1) có mức cao nhưng Input 1 (Chân 2) ở mức thấp. Để điều khiển vòng quay động cơ mắc vào chân 11 & 14, thì chân 9,10 & 11 sẽ được sử dụng. Nếu Input 1 và Input 2 có cùng mức logic cùng lúc hoặc kích hoạt 1 chân ở mức logic thấp thì sẽ không quay. Tương tự đối với Input 3, Input 4 và enable 2.
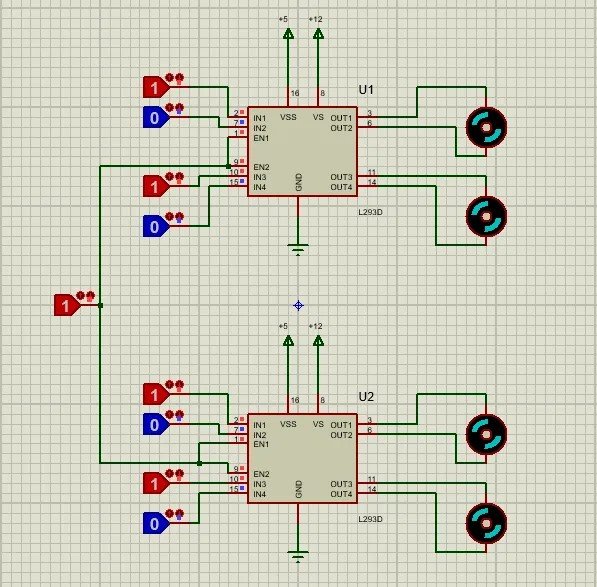
Đây là một ví dụ về điều khiển vòng quay của các chiếc xe đua đường phố. Chúng ta chỉ cần sử dụng hai IC L293D để điều khiển xe.
Kết nối tất cả các chân enable với nhau và sử dụng một nút nhấn để điều khiển động cơ.
Sau đó mắc các chân đầu vào với bộ vi điều khiển hoặc bộ vi xử lý và điều khiển hướng quay.
Tốc độ của ô tô có thể được điều khiển bằng tín hiệu PWM từ chân enable
Sau khi mắc tất cả các chân vào vi điều khiển / vi xử lý theo các trạng thái để điều khiển hướng đi của ô tô.
Nếu Input 1 và Input 3 của cả hai IC L392D đều ở mức logic cao thì xe sẽ chuyển động theo hướng đi lên. Để thay đổi hướng từ tiến sang lùi, chỉ cần thay đổi tất cả các đầu vào hướng đi lên từ cao xuống thấp và thấp đến cao.
Để chuyển hướng rẽ sang phải trái, chỉ cần tắt các bánh xe thuộc hướng đó thì sẽ rẽ đc.
Nếu muốn xe rẽ trái hơn chỉ cần tắt bánh bên phải bằng cách cho cùng một đầu vào tương ứng bánh xe bên phải. Làm tương tự cho bánh xe bên trái di chuyển sang phải.
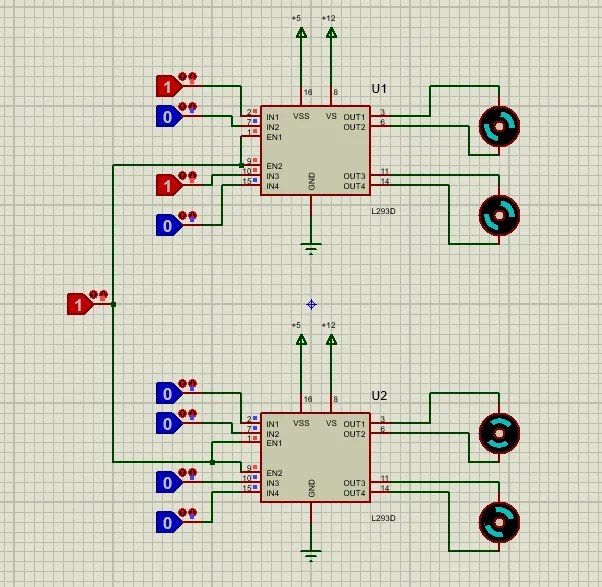
Tất cả các phương pháp trên thường được sử dụng cho xe hơi. Các chức năng này có thể được phát triển theo yêu cầu. Robot hoặc các xe khác nhau sẽ sử dụng để điều khiển nhiều động cơ DC (4,5 -36 V) hướng quay và tốc độ, L293D là lựa chọn tốt nhất.
https://www.youtube.com/watch?v=GjqbI-2A0Cw
>>> 100+ Mã Sản Phẩm Dây Rút: https://mecsu.vn/san-pham/day-rut-nhua.5op
>>> 1000+ Mã Sản Phẩm Đầu Cosse: https://mecsu.vn/san-pham/dau-cosse.Q1j
>> Mời anh em xem thêm












.jpg)
