
MG995 là động cơ servo phổ biến vì đạt hiệu suất và giá thành rẻ. Động cơ được sử dụng trong nhiều ứng dụng chủ yếu là robot và máy bay không người lái.

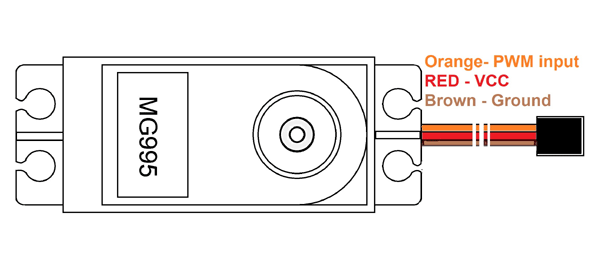
MG995 có ba chân như trong sơ đồ chân và chức năng của mỗi chân được đưa ra bên dưới.
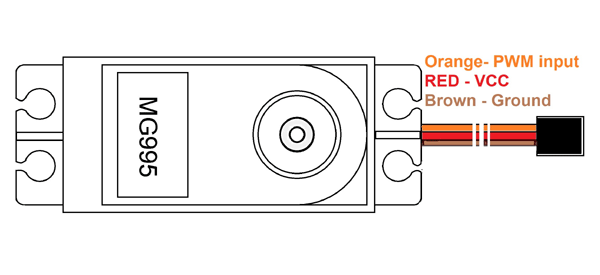
| Số chân | Tên | Chức năng |
| 1 | Chân signal (Chân màu cam) | Chân nhận tín hiệu PWM. |
| 2 | VCC (Chân màu đỏ) | Chân cấp nguồn điện dương cho động cơ servo. |
| 3 | Ground (Chân màu nâu) | Chân nối đất của mạch hoặc nguồn điện. |
FS5103R, MG996R , MG09R, SG90
Vì MG995 là động cơ servo có khả năng quay chính xác trong phạm vi 180º nên các ứng dụng của nó rất nhiều và trong đó có một số ứng dụng được nêu dưới đây
Servo phù hợp để thiết kế cánh tay robot có độ hao mòn của động cơ cao. Là các bánh răng bằng kim loại, servo có tuổi thọ cao và có thể được lắp đặt trên hệ thống cánh tay robot.
Servo ứng dụng trong máy bay không người lái và máy bay đồ chơi. Có momen xoắn đủ cao để thắng sức cản của không khí và các cánh điều khiển của máy bay, servo được ưu tiên sử dụng trong các máy bay đồ chơi và máy bay không người lái cần điều khiển chính xác bất kể ở điều kiện nào.
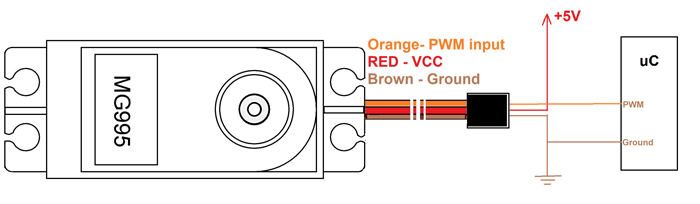
Đầu tiên hãy xem cách kết nối mạch của servo như hình dưới đây. Ở đây, dây đỏ được kết nối với nguồn được ổn áp + 5V có thể cấp dòng điện lên đến 1Amp, dây nâu được nối đất và dây cam được kết nối với đầu ra PWM (Pulse Width modulation) của vi điều khiển. Trong mạch nếu vi điều khiển và servo cấp nguồn điện khác nhau thì cần nối đất vi điều khiển với nối đất servo.
Bây giờ để điều khiển servo, chỉ có hai điều quan trọng cần nhớ:
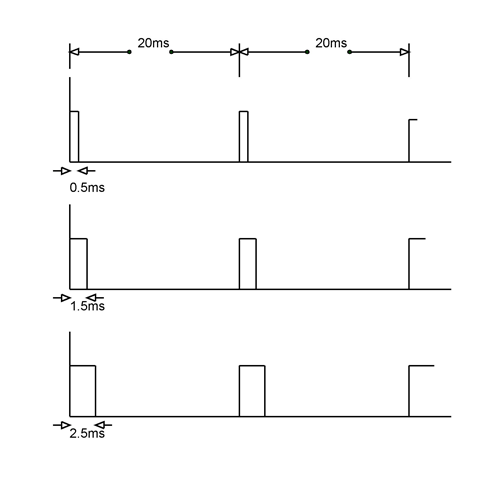
Tần số của PWM: MG995 lấy tín hiệu PWM có tần số 50Hz và bất kỳ tín hiệu PWM tần số nào cao hơn và thấp hơn sẽ xuất hiện lỗi. Như trong hình, mỗi chu kỳ đơn của PWM cần có độ rộng 20ms cho tần số 50Hz.
Chu kỳ xử lý (Duty cycle) của PWM: Chu kỳ xử lý của PWM (hoặc tỷ lệ thời gian bật trên tổng thời gian chu kỳ) xác định vị trí của trục servo. Nếu cấp tín hiệu PWM trong thời gian bật 0,5ms trong chu kỳ 20mS, thì trục servo sẽ di chuyển về 0º.
Và nếu cấp tín hiệu PWM trong thời gian bật 1,5ms trong chu kỳ 20mS, trục servo sẽ di chuyển đến vị trí 90º. Cuối cùng, nếu cấp tín hiệu PWM trong thời gian bật 2,5ms trong chu kỳ 20mS, thì trục servo sẽ di chuyển đến vị trí 180º.
Dựa trên các giá trị chuẩn này, có thể tính toán mức độ quay của servo. Sau khi tính toán, cần điều chỉnh chu kỳ xử lý của tín hiệu PWM để servo đọc tín hiệu và thay đổi đến vị trí mong muốn.
Bằng cách này, có thể điều khiển vị trí servo bằng tín hiệu PWM từ vi điều khiển hoặc bộ xử lý. Trong arduino và các bảng mạch điều khiển khác, có sẵn các thư viện để giúp việc điều khiển servo dễ dàng hơn. Nếu sử dụng các thư viện đó, có thể chỉ định trực tiếp vị trí servo thay vì điều chỉnh chu kỳ xử lý của tín hiệu PWM mỗi lần.
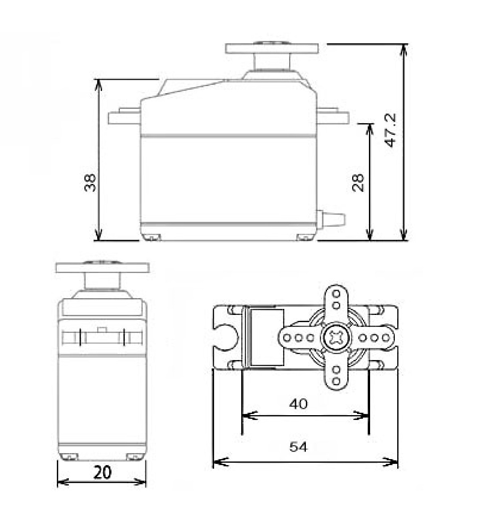
Tất cả các kích thước đều tính bằng milimét
>>> 100+ Mã Sản Phẩm Dây Rút: https://mecsu.vn/san-pham/day-rut-nhua.5op
>>> 1000+ Mã Sản Phẩm Đầu Cosse: https://mecsu.vn/san-pham/dau-cosse.Q1j
>> Mời anh em xem thêm







![[Tìm hiểu] Transistor NPN D880](https://cms.mecsu.vn/uploads/media/2023/07/transistor-npn-d880-2-418x420.png)
![[Tìm hiểu] Flip-Flop Dual D 74LS74](https://cms.mecsu.vn/uploads/media/2023/07/flip-flop-dual-d-74ls74-2-600x420.png)
![[Tìm hiểu] Transistor BD139](https://cms.mecsu.vn/uploads/media/2023/07/transistor-bd139-2.png)

.jpg)
