
Arduino MKR1000 là một trong những bo mạch thông minh, được thiết kế với sự kết hợp giữa Arduino và bo mạch wifi. Mục đích cơ bản là giới thiệu một thiết bị nhỏ và phù hợp với thị trường cho các dự án IoT.
IoT gần đây đã phát triển rất mạnh trên thế giới và MKR1000 là một trong những lựa chọn tốt nhất do có nhiều chân chức năng. MKR1000 được thiết kế với SAMD21 Cortex và bo mạch WiFi WINC1500 công suất thấp.
Mọi chức năng IoT đều có thể được thực hiện bằng cách sử dụng nó. Không có quá nhiều chân và các chức năng làm cho nó trở nên thích hợp hơn so sánh với các bảng mạch IoT khác.
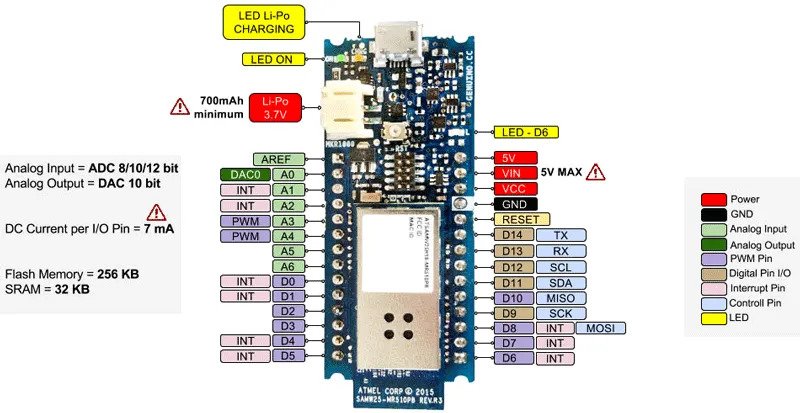
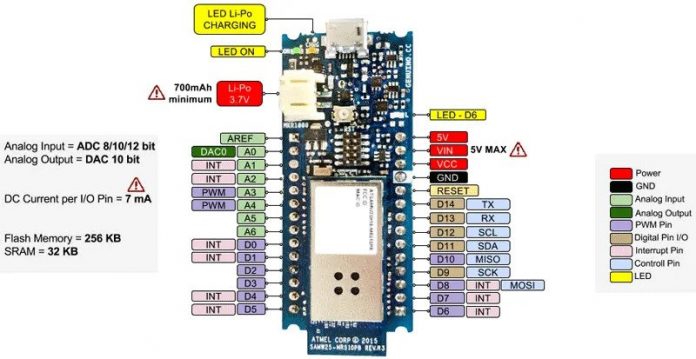
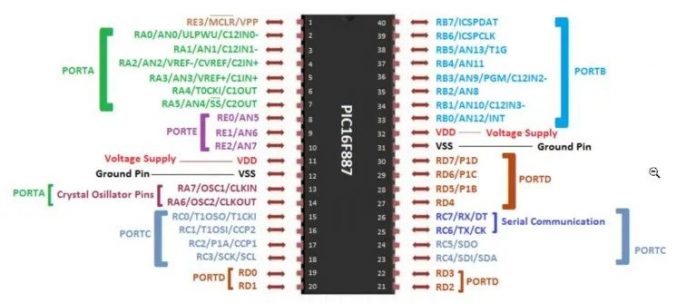
MKR1000 có số lượng lớn các chân GPIO so với các chân khác và tất cả chúng đều được thảo luận bên dưới. Đây là sơ đồ chân của bảng mạch phát triển Arduino MKR1000.
Trong Arduino MKR1000, có 15 chân trong đó tất cả đều có thể điều khiển thông qua lập trình Arduino. Điện áp nguồn trên các chân này sẽ không quá 3,3V. Trong trường hợp đầu vào, thiết bị bên ngoài chỉ nên sử dụng tối đa 3,3V. Một vài lần tăng điện áp trên 3,3V có thể làm hỏng toàn bộ bảng mạch.
Một số chân I / O có thể thực hiện một số chức năng khác ngoài chức năng I/O đơn giản. Vì vậy, trước khi sử dụng nên được khởi tạo sử dụng trong chương trình. Tất cả các chân không thể thực hiện nhiều chức năng cùng một lúc và chỉ có thể thay đổi chức năng thông qua lập trình. Tất cả các chân I / O digital là:
Chân D6 được kết nối với đèn LED trên bo mạch. Bất kỳ xung nào cũng có thể tác động đến đèn LED.
Trong IoT, ngắt là một trong những yêu cầu cơ bản để thực hiện một số hoạt động như điều khiển điện áp cao, v.v. và giao tiếp với một số cảm biến thông minh. Arduino MKR1000 có tổng cộng 9 chân ngắt. Ngắt về cơ bản là để báo tín hiệu để xử lý sự kiện trong CPU. Trong quá trình sử dụng ngắt cần lưu ý hai điều.
Thứ nhất, không được có độ trễ deplay trong hàm ngắt và thứ hai, không được có bất kỳ dữ liệu in serial nào trong hàm ngắt. Tất cả các chân ngắt có thể hoạt động theo tín hiệu đầu vào. Thông thường, Arduino hoạt động dựa trên ba loại tín hiệu ngắt: Xung cạnh lên, Có sự thay đổi trạng thái, Xung cạnh xuống. Tất cả các chân ngắt của board Arduino MKR1000 là:
Hầu hết các thiết bị sử dụng phương thức giao tiếp nối tiếp và giao tiếp nối tiếp cũng có nhiều loại. Đó là:
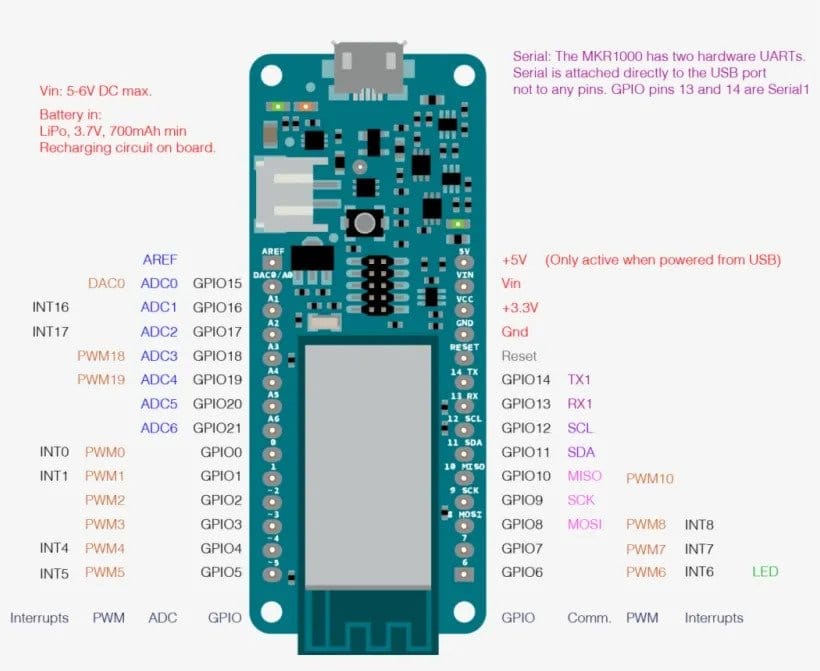
Tất cả các bảng mạch Arduino đều có giao thức nối tiếp UART thông qua cổng đầu vào USB nhưng cũng có các chân giao tiếp. Có 2 chân và sử dụng xung clock bên trong chương trình (Tốc độ truyền). Tốc độ truyền có các giá trị cụ thể khác nhau có thể được khởi tạo thông qua lập trình để giao tiếp với hai thiết bị. Các chân UART trên bo mạch Wi-Fi Arduino MKR1000 là:
Giao thức này sử dụng bốn dây để giao tiếp. Các dây đó là MOSI, MISO, SCK, SS '. Chân MOSI được sử dụng để gửi dữ liệu từ Arduino đến module bên ngoài.
MISO để nhận dữ liệu được truyền. SCK là cho xung clock, để giữ nhịp truyền dữ liệu theo xung nhịp bên ngoài. Chân cuối cùng là chân CS chỉ để chọn các thiết bị giao tiếp. Chân SS hiệu quả nhất trong trường hợp có nhiều thiết bị SPI. Bất kỳ I / O nào cũng có thể được dùng làm chân SS thông qua lập trình. Tất cả các chân SPI của Arduino MKR1000 Board là:
Giao thức chỉ sử dụng hai dây, một dây cho dữ liệu và một dây cho xung clock. Giao thức này chỉ được sử dụng khi giao tiếp dữ liệu nối tiếp một chiều. Trong Arduino MKR1000, tất cả các chân I 2 C là:
Arduino MKR1000 có nhiều chân PWM . Có tổng cộng 12 PWM và chúng có thể tạo ra bất kỳ tín hiệu đầu ra mong muốn nào. Tất cả PWM có thể được điều khiển thông qua lập trình.
Tất cả các chân PWM có giá trị từ 0 đến 255. Mỗi tín hiệu đầu ra có thể được chuyển đổi thành tín hiệu đầu ra mong muốn chỉ thông qua các chân PWM. Tất cả PWM là:
Tất cả các chân analog và digital có thể chuyển đổi bất kỳ dữ liệu đầu vào analog nào thành dữ liệu digital. Trong Arduino MKR1000, có bộ ADC khác với những ADC khác.
Có ba ADC 8 bit, 10 bit và 12 bit ADC. Các ADC này lấy tín hiệu analog là điện áp từ 8 chân ADC rồi chuyển đổi chúng. Tất cả các chân ADC của Arduino MKR1000 là:
Chân AREF
Ở mặc định, các chân đầu vào analog sử dụng điện áp cung cấp điện làm tham chiếu. Do nguồn điện và điện áp đầu ra analog, nên đôi khi bộ ADC đưa ra các giá trị không mong muốn. Để giải quyết vấn đề này, Arduino MKR1000 có một chân tham chiếu analog. Chân này có thể được sử dụng để cấp điện áp tham chiếu analog đầu ra.
Module DAC
Hầu hết chỉ cần sử dụng các chân chuyển đổi analog sang digital nhưng một số thời gian để vận hành các thiết bị bên ngoài, tín hiệu analog cũng được yêu cầu. Trong những trường hợp này, Arduino MKR1000 có một chân DAC. Chân này có thể được sử dụng thông qua lập trình nhưng điện áp trên chân này sẽ không tăng quá giá trị điện áp nguồn.
Chân reset
Arduino MKR1000 có thể được thiết lập lại thông qua chương trình bên trong nhưng nó cũng có một chân reset bên ngoài. Chân reset bên ngoài có thể được sử dụng từ bất kỳ module bên ngoài nào, chỉ cần cấp logic thấp để đặt lại thiết bị.
Chân nguồn
Có nhiều chân đầu vào và đầu ra nguồn trong MKR1000.
Chân Lip-Po
Chân Lip-po là một trong những chân đầu vào nguồn của MKR1000. Điện áp cho phếp tối đa là 3.7V, nhưng hơn 3.7V có thể làm hỏng bo mạch. Giá trị dòng điện vẫn có tác động đến bảng mạch. Để giữ an toàn cho bo mạch, dòng điện cũng không được quá 7000mAh.
Nguồn cấp từ USB
Cổng USB chủ yếu kết nối với máy tính hoặc bộ sạc điện áp 4.7 đến 5V. Trong trường hợp dùng bất kì nguồn cấp nào, chỉ cần đảm bảo điện áp không được tăng quá 5V.
Vin
Có một chân đầu vào nguồn trên bảng mạch Arduino. Nguồn điện đầu vào trên chân Vin chỉ nên từ 5-6V.
5V
Chân 5V được sử dụng để cấp 5V cho các module bên ngoài. Điện áp trên các chân này cấp trực tiếp từ chân USB.
VCC
VCC là chân đầu ra nguồn cấp cho các thiết bị khác. Có điện áp tối đa là 3,3V đến từ bộ điều chỉnh điện áp.
| Các tính năng và thông số kỹ thuật | |
| Vi điều khiển | SAMD21 Cortex-M0 với MCU ARM công suất thấp 32 bit |
| Đầu vào nguồn (USB / VIN) | 5V |
| Nguồn Pin được hỗ trợ | Single-cell của Li-po |
| Điện áp mạch | 3,3V |
| Chân I / O digital | 15 chân |
| Các chân PWM | 12 chân |
| UART | 1 kênh |
| SPI | 1 kênh |
| I2C | 1 kênh |
| Chân đầu vào analog | 7 chân (8/10/12 bit) |
| Chân đầu ra analog | 1 chân (DAC 10 bit) |
| Ngắt ngoài | 8 chân |
| Dòng điện DC trên mỗi chân I / O | 7mA |
| Bộ tạo dao động | 32,768 kHz (RTC), 48 MHz |
| Đèn led báo nguồn | Có |
| Đèn LED | D6 |
| Wifi | Có |
| LAN | Không có |
| Boot Loader | Có |
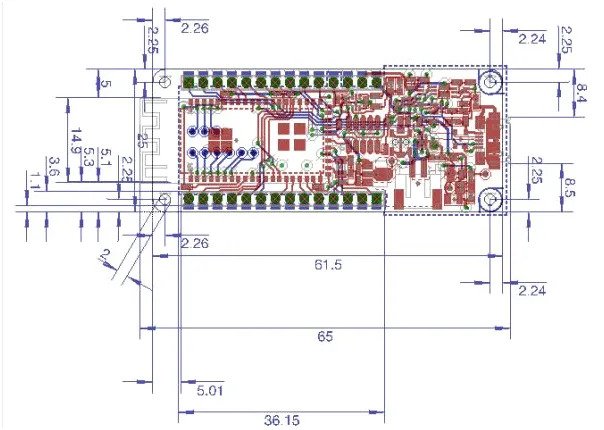
| Chiều dài | 61,5 mm |
| Chiều rộng | 25 mm |
| Cân nặng | 32 gram |
| Bộ nhớ flash | 256 KB |
| SRAM | 32 KB |
| EEPROM | Không |
>>> 100+ Mã Sản Phẩm Dây Rút: https://mecsu.vn/san-pham/day-rut-nhua.5op
>>> 1000+ Mã Sản Phẩm Đầu Cosse: https://mecsu.vn/san-pham/dau-cosse.Q1j
>>> Mời anh em xem thêm:







![[Tìm hiểu] Kit vi điều khiển MSP432](https://cms.mecsu.vn/uploads/media/2023/07/tim-hieu-kit-vi-dieu-khien-msp432-625x420.jpg)

![[Tìm hiểu] Vi điều khiển ATMega32](https://cms.mecsu.vn/uploads/media/2023/07/vi-dieu-khien-atmega32-1-599x420.jpg)

.jpg)
